 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網


 | 6ES7214-1HG40-0XB0 SIMATIC S7-1200,CPU 1214C, 緊湊型 CPU,DC/DC/繼電器, 機載 I/O: 14 個 24V DC 數字輸入;10 DO 繼電器 2A; 2 AI 0-10V DC, 電源:直流 20.4-28.8V DC, 程序/數據存儲器 100 KB |
S7-1200的PID控制支持通過系統自整定方式得出合適的PID參數,下面我們以PID_Compact指令結合被控仿真對象為例,通過若干張圖呈現這一自整定過程,自整定包括預調節和精確調節兩步。
(1)添加循環中斷OB,因為PID指令塊一定要放在循環中斷塊內調用,確保PID運算以固定的采樣周期完成,如圖1所示。
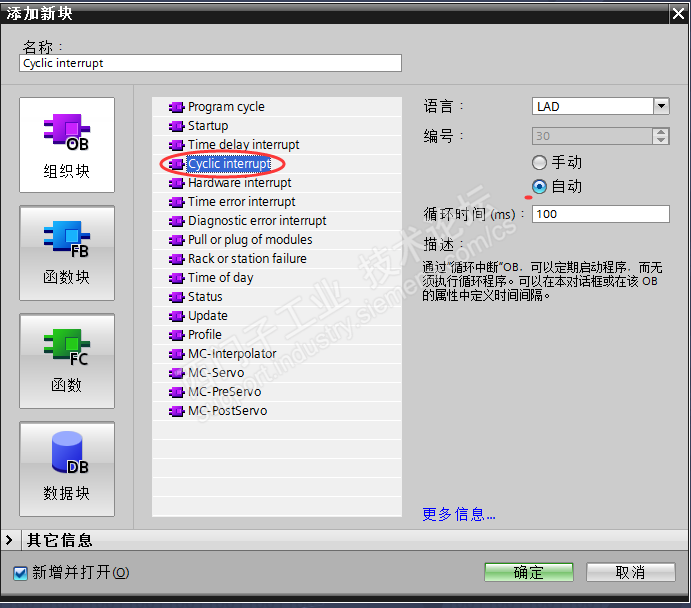
圖1:添加循環中斷OB30
(2)從右側指令>工藝>PID控制 里面選擇PID_Compact指令,也可從工藝對象里添加,可通過指令塊圖標直接進入到組態/調試窗口,如圖2所示。

圖2:PID_Compact指令塊
(3)進入工藝對象組態窗口進行相關設置,因為被控對象仿真,Input/Output選項卡設定下就可以了,其他按默認不予考慮,如圖3所示。
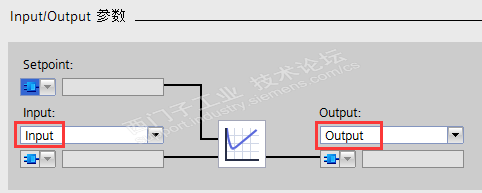
圖3: Input/Outpu參數設置
(4)對PID指令塊管腳添加相關變量,如圖4所示。
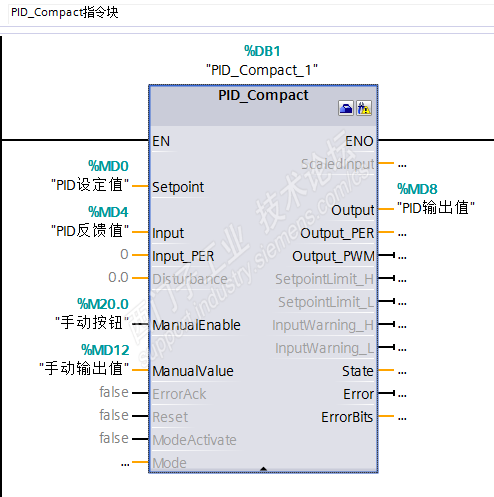
圖4:給PID指令塊管腳添加變量
(5)從全局庫添加PID被控對象仿真塊到循環OB中,該仿真塊可以從西門子技術資源下載,條目號79047704,如圖5所示。
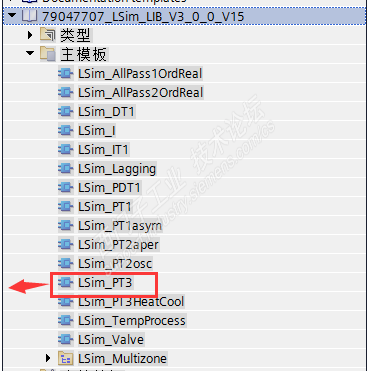
圖5:調用被控對象仿真塊
(6)PID的輸出值作為被控仿真對象的輸入,被控仿真對象的輸出作為PID的反饋值,如圖6所示。
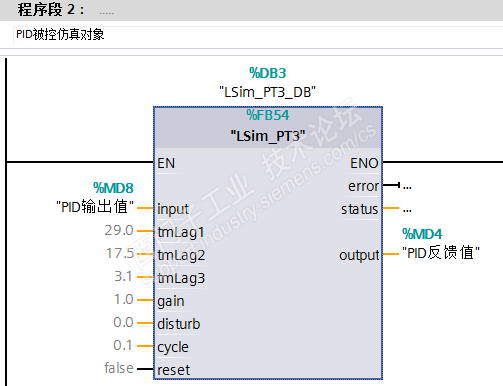
圖6:被控對象仿真塊管腳變量
(7)下載程序到PLC并進入調試(自整定)界面,先啟動測量,此時預調節條件還未滿足,如圖7所示。
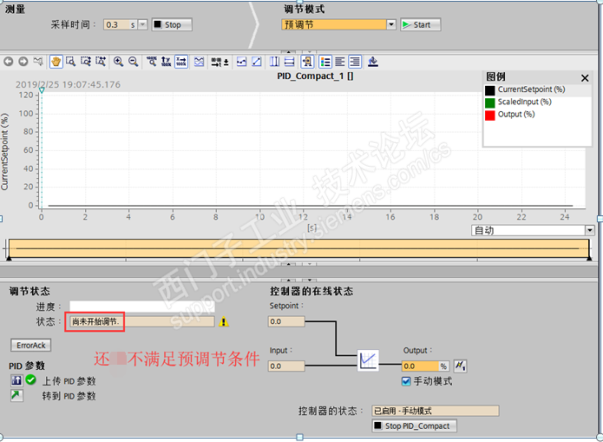
圖7:進入到工藝對象PID調試面板
(8)滿足預調節主要條件1:設定值-當前值>(過程值上限-過程值下限)×30%,
設定值-當前值>設定值×50%,如圖8所示。
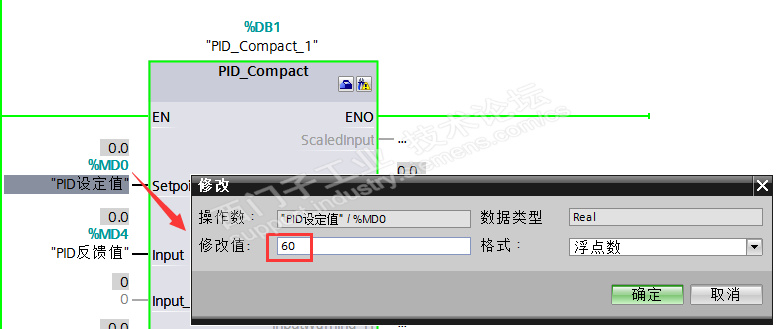
圖8:修改設定值來滿足預調節條件
(9)滿足預調節主要條件2,PID必須處于“未激活”、“手動”、或“自動”模式,如圖9所示。
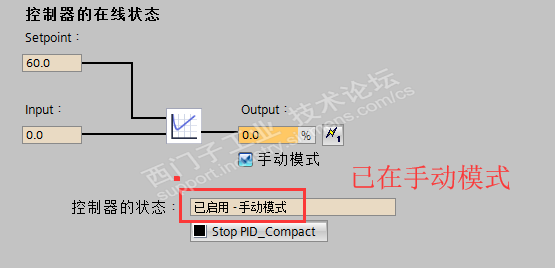
圖9:PID已在手動模式
(10)啟動預調節,如圖10所示。
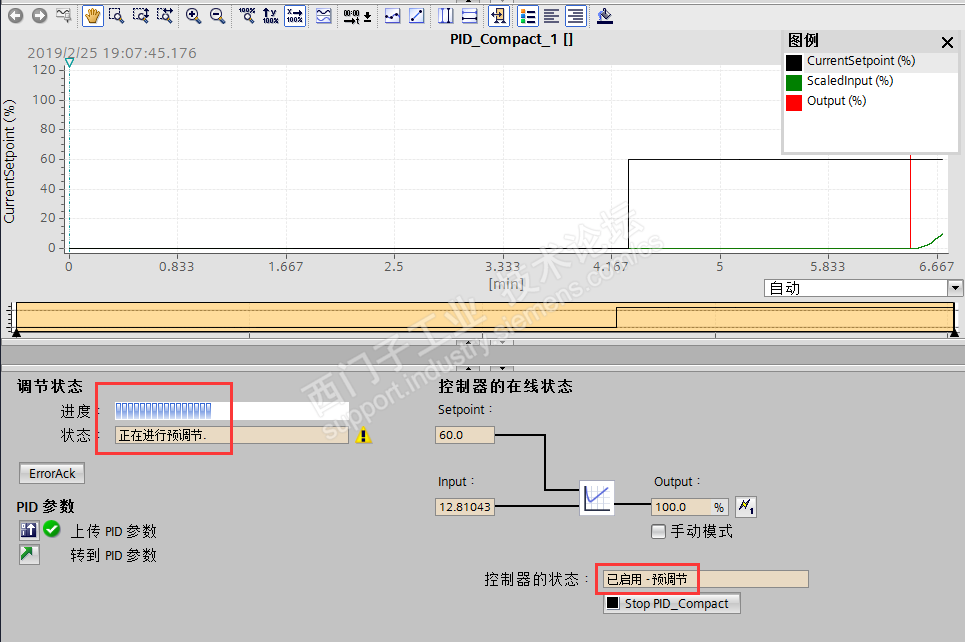
圖10:預調節開始
(11)預調節結束并上傳參數,如圖11所示。
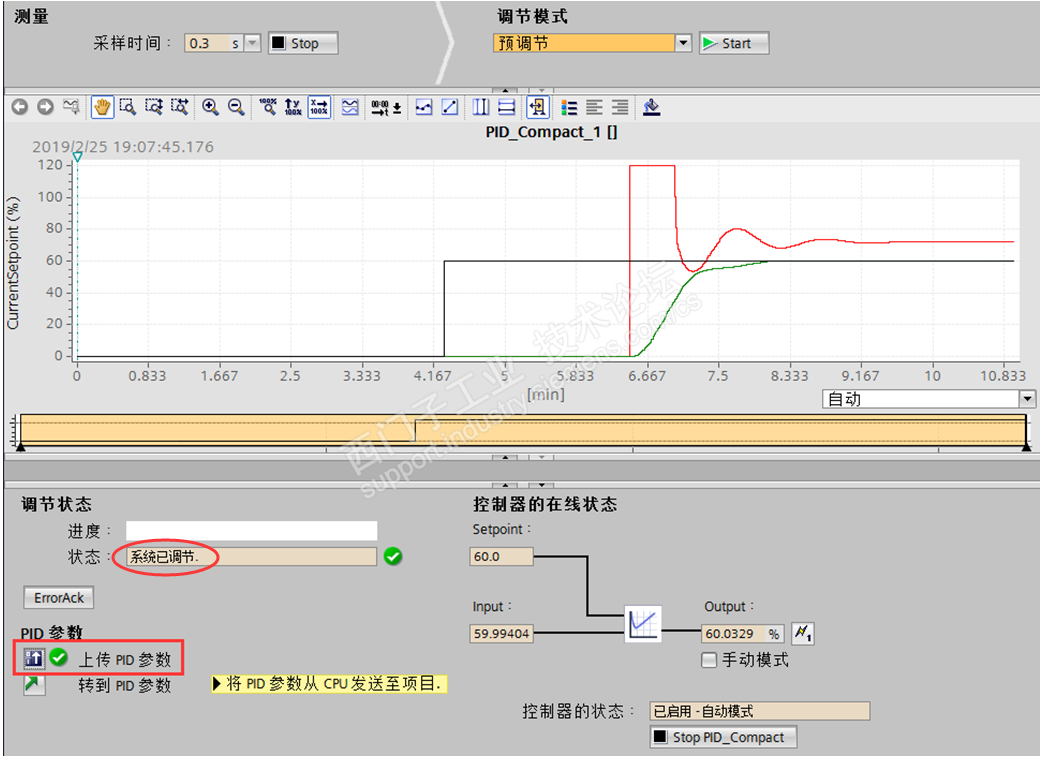
圖11:預調節完成并上傳參數(調節完一定要上傳參數)
(12)啟動精確調節,如圖12所示。
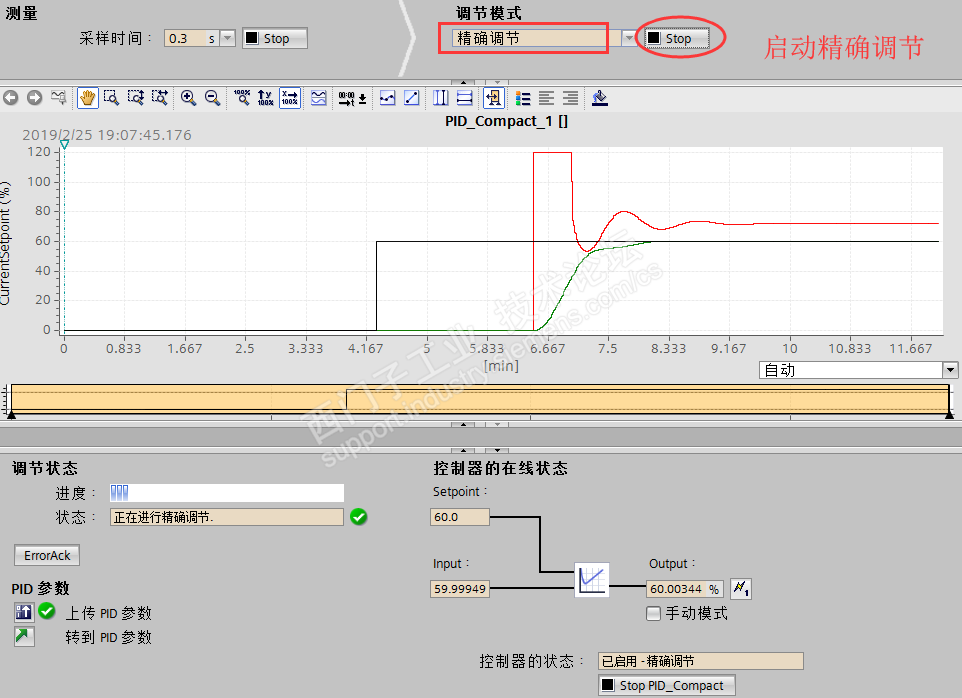
圖12:啟動精確調節
(13)精確調節完成并上傳參數,如圖13所示。
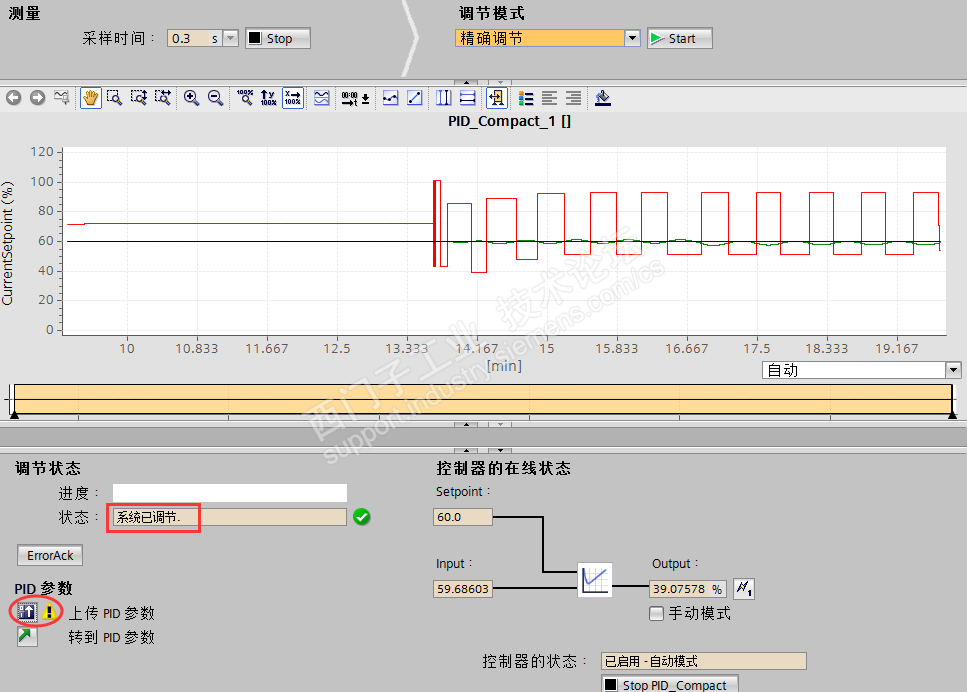
圖13:精確調節完成,一定要上傳參數。
(14)獲得的調節參數通過上傳參數將自整定參數上傳到項目中,也就是起始值,如圖14所示。
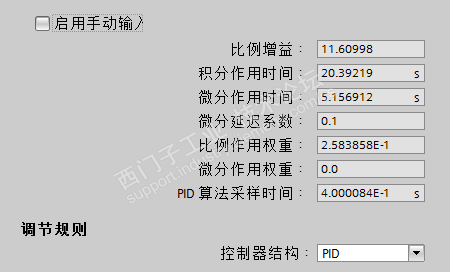
圖14:獲得的自整定參數
至此,自整定全部完成,注意上傳PID參數后,將出現程序不一致情況,建議重新下載程序。