 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網


| 應用領域 | 建材/家具,電子/電池 |
|---|
6ES7288-2QT16-0AA0
SIMATIC S7-200 SMART, 數字輸出 EM DT16, 16 個數字輸出端,24VDC,晶體管 0.75A
 |
| 參考價 | 面議 |
更新時間:2023-07-15 21:21:55瀏覽次數:404
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
|
|
|
6ES72882QT160AA0西門子數字量輸出模塊
6ES7288-2QT16-0AA0
SIMATIC S7-200 SMART, 數字輸出 EM DT16, 16 個數字輸出端,24VDC,晶體管 0.75A
SIEMENS西門子
*,質量保證,保修一年
專業銷售及維修西門子各類工控自動化配件;
:S7-200CN、S7-200SMART、S7-300、S7-400、 S7-1200、S7-1500、ET200、LOGO邏西門子可編程控制器輯控制模塊
西門子HMI人機界面:觸摸屏
西門子變頻器:MM420、MM430、MM440、G110、G120、6SE70
西門子工業以太網:通訊網卡、通訊電纜、通訊接頭、總線連接器 工控機、交換機、自動化軟件等系型號齊全,快速報價,買我們的產品無憂所值,我們的產品都承諾質保一年,讓您買的省心舒心,用的放心!
1.1 SLVC控制模式概述
矢量控制(Vector Control)也稱為磁場定向控制,是一種利用變頻器控制三相交流電機的技術。矢量控制實現的基本原理是通過測量和控制異步電動機定子電流矢量,根據磁場定向原理分別對異步電動機的勵磁電流和轉矩電流進行控制,從而達到控制異步電動機轉矩的目的。矢量控制分為有編碼器的矢量控制和無編碼器的矢量控制(SLVC:Sensorless Vector Control),而無編碼器的矢量控制是指沒有外部傳感器用于測量速度,其電機的實際轉速是通過電機電流、電壓的電氣模型計算出的,因此其精度低于帶編碼器矢量控制。
SLVC控制方式在0Hz左右的低頻區,由于電氣模型無法精確的計算出轉速,因此在低頻范圍內矢量控制會從閉環切換為開環。此時,對于異步電動機忽略定、轉子漏抗,其轉矩表達式以及固有機械特性如下所示:
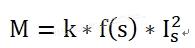
其中是轉差的函數,k為常量,為定子電流。
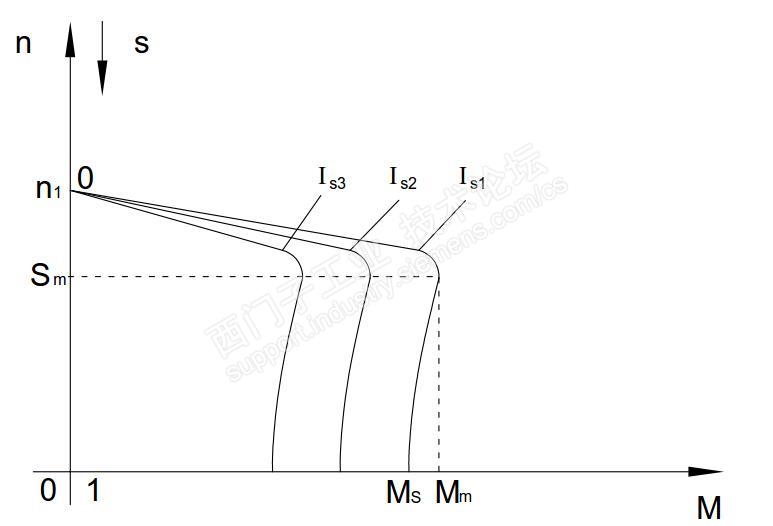
圖 1 異步電動機的固有機械特性(Is3 < Is2 < Is1)
由異步電動機固有機械特性可知,當轉差率一定的情況下,增加定子電流可以增加轉矩,因此在開環控制中,對于靜態負載或在加速過程中,可以通過調整轉矩上限以內的p1610(靜態轉矩設定值)和p1611(加速附加轉矩)來保證電機的啟動和加速過程。當定子電流一定的情況下,當轉差率為時,轉矩達到大轉矩。SLVC控制模式在閉環控制運行時通過測量定子電流、電壓來計算出實際轉速,根據需要的轉差率來設定定子頻率,從而實現有效的轉矩控制。
SLVC控制開環控制和閉環控制的切換條件是由時間條件和頻率條件(p1755、p1756和p1758)控制的。如下圖所示,
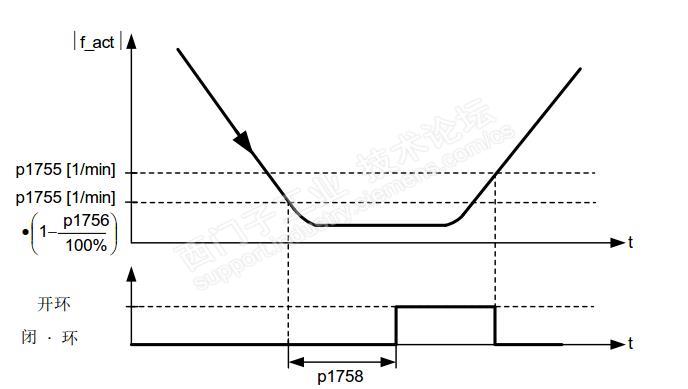
圖 2 SLVC的切換前提
如果斜坡函數發生器輸入端的設定頻率和實際頻率同時低于“”,則時間條件p1758無效。
1.2 被動性負載的特性
被動負載指只能被電機驅動而不能驅動電機的負載,例如:惰性質量泵、風扇、離心機、擠出機、運行驅動、水平輸送裝置等。下圖為水平傳送帶帶載啟動到穩定運行的一個狀態曲線,表示電機轉矩,表示負載轉矩,在0 — 時間段內負載轉矩隨著電機轉矩的增加而增加,一直到時刻負載被拉動,拉動后負載轉矩驟降然后隨著轉速的增加負載轉矩慢慢增加一直達到穩態達到恒定的負載轉矩,當系統達到穩定轉速后電機轉矩等于負載轉矩。
對于這類負載,電機可長時間處于靜止狀態,無需保持電流。
1.3 SLVC控制被動性負載的問題
當使用SLVC(無編碼器矢量控制)控制被動性負載時,在 0 Hz 左右的低頻區內,模型無法足夠精確地計算出電機轉速。因此在低頻范圍內矢量控制會從閉環切換為開環,電機的輸出轉矩由p1610(靜態轉矩給定)來決定,如果p1610設置過大可能會導致靜止狀態下的電機過熱、電機速度不穩定,那么能否使被動性負載在0Hz左右的低頻區保持速度閉環控制呢?
1.4 S120 SLVC模式被動負載功能設置
異步電機在起動點上拖動的是被動負載時,可以在 0 頻率點(靜止)前一直在閉環控制中穩定運行,不會中途切換到開環控制。參數設置如下所示:
①設置 p0500 = 2(工藝應用 = 無編碼器閉環控制中的被動負載,直至 f = 0);
②設置 p0578 = 1(計算工藝相關參數),
此時會自動設置以下參數:
– p1574 = 2 V(使用異步電機時)
– p1574 = 4 V(使用他勵同步電機時)
– p1750.2 = 1,被動負載條件下在 0 Hz 前一直在閉環控制中運行
– p1750.3 = 1,電機模型測定飽和特定曲線
– p1802 = 4(RZM/FLB,不進行過調制)
– p1803 = 106 %(出廠設置)
或者直接設置參數p1750.2=1(p1750.3跟隨p1750.2自動設置為1)
說明:如果在電機調試內設置了 p0500,就可以通過 p0340 和 p3900 自動計算,p0578 不再需要單獨設置。
這種連續的轉速閉環控制只限電機拖動被動負載的應用,此時電機可長時間處于靜止狀態,無需保持電流,在靜止狀態下僅會向電機注入勵磁電流。下圖是SLVC中是否激活被動負載功能的曲線對比,在激活被動負載功能后電機在0Hz附近的電流只有勵磁電流,明顯低于開環控制時的電流。下圖1和圖2是未激活被動負載與激活被動負載功能的對比:
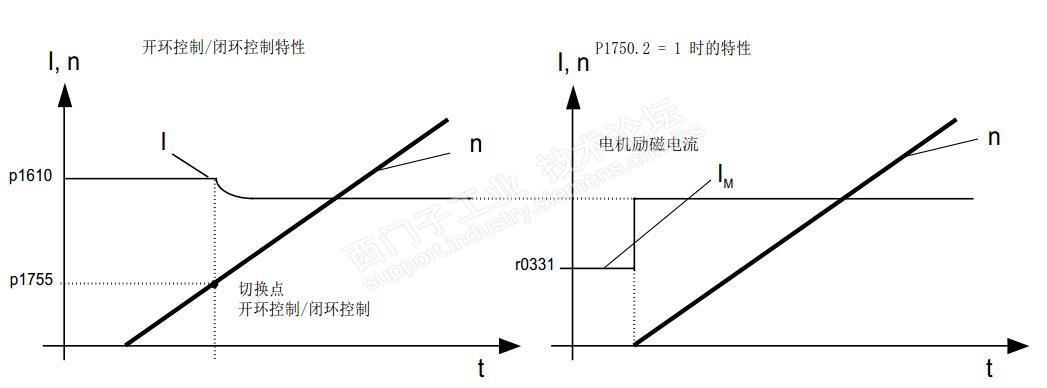
圖 1未激活被動負載功能 圖 2激活被動負載功能
1.5 應用案例與分析
【案例一】
S120應用于開卷機中,原來配置是帶編碼器的矢量控制,后因為編碼器出現故障,于是將S120的控制方式改為無編碼器的矢量控制,在SLVC控制模式下,通過速度控制加轉矩限幅的方式來建張,但是在建張過程中出現速度不穩定,拉不緊,用對拖實驗模擬現場情況,電機1作為開卷機,為不帶編碼器的矢量控制模式,速度控制加轉矩限幅,電機2為帶編碼器的矢量控制方式,作為張力輥電機,電機1先以-50rpm轉速啟動轉矩限幅10%,電機2以0轉速轉矩限幅0%啟動,啟動后慢慢加轉矩先5%然后10%后加到15%,再加到100%,在轉矩慢慢增加的過程中,電機1的輸出轉矩慢慢增加,一直達到轉矩限幅值10%,同時速度慢慢降低趨于0速,由此張力建立,但是在穩定狀態,電機的速度和轉矩不穩定,左右搖擺,如下圖3所示:

圖 3異常情
原因分析:在鋼卷拉緊過程中,當開卷機實際轉速小于p1755*(1-p1756/100%)時經過p1758的時間切換到開環控制模式,模型不準確造成了轉矩和轉速的波動。
將電機1設置為被動性負載功能(p1750.2=1)后,在相同的啟動條件下,達到穩定狀態后速度和轉矩相對穩定,電機軸保持靜止。如下圖4所示:
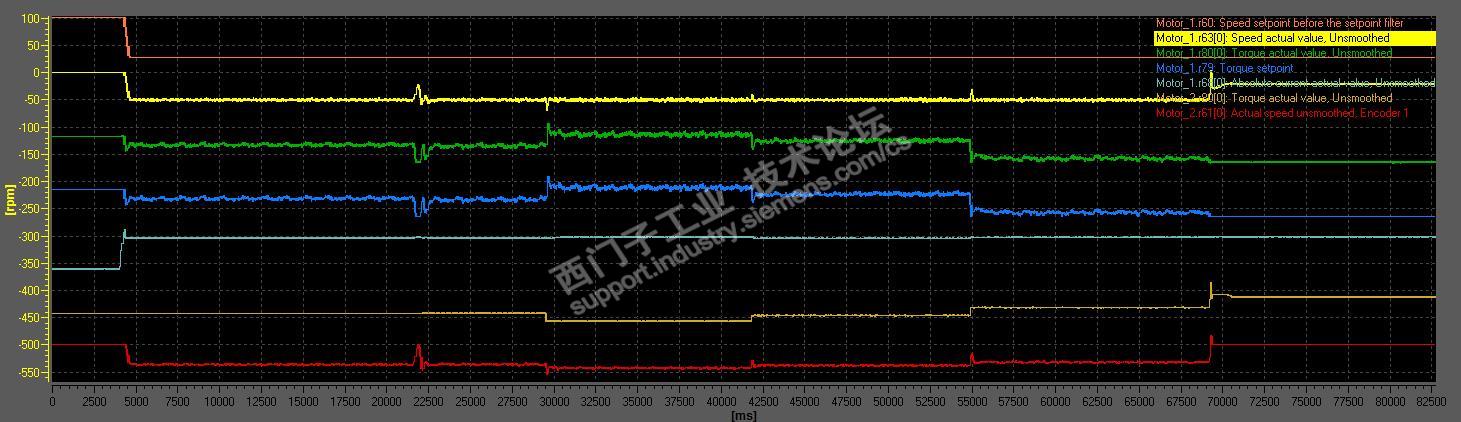
圖 4激活被動性負載功能后的情況
【案例二】
S120 SLVC控制模式,控制皮帶傳輸機,因在低頻范圍內會切換到開環控制模式,為使皮帶機能夠正常啟動,經常將p1610、p1611設置成較大的值,但是由于生產工作中皮帶機又經常會在零速下長時間運行,電機零速下通入較大的電流可能會導致電機的過熱甚至燒壞繞組。
實驗模擬現場情況,電機1為皮帶傳輸機的主電機,無編碼器的矢量控制方式,電機2作為皮帶或負載,帶編碼器的矢量控制方式。先啟動電機2,以零速20%的轉矩啟動,然后電機1先以零速啟動,然后以速度100RPM(小于p1755切換轉速)運行,如圖5所示,在零速時勵磁電流分量等于值電流等于3.3A,給定轉速后電流、速度波動很大。

圖 5 SLVC控制模式下啟動的情況
當激活被動性負載功能(p1750.2=1)后,同樣的啟動方式,在零速時勵磁電流分量等于值電流等于2.6A等于電機的額定勵磁電流,給定速度后電流波動小,同時轉矩電流分量建立,如圖6所示:
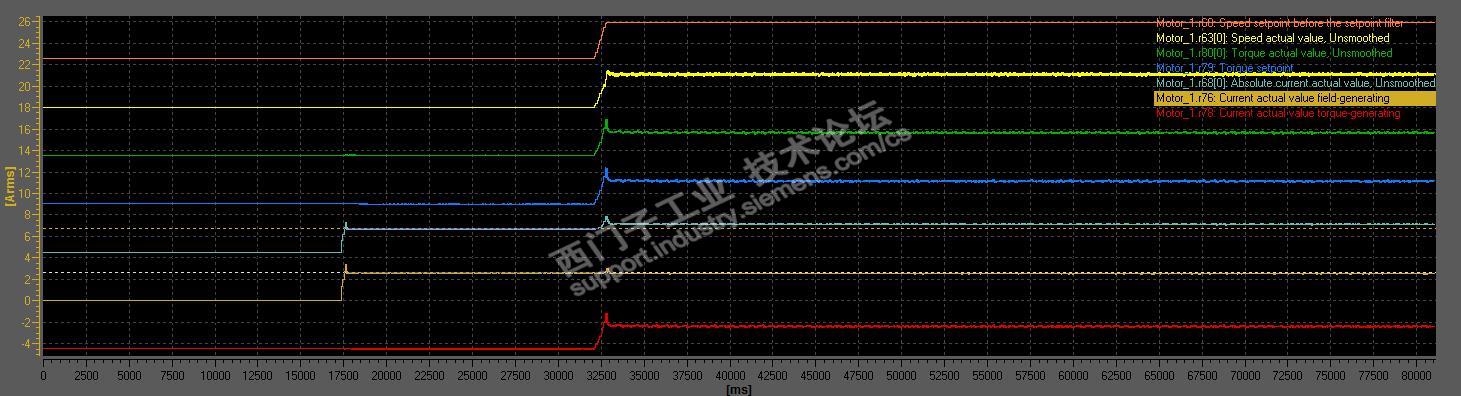
圖 6 SLVC控制模式下激活被動負載功能后的啟動情況
1.6 SLVC模式激活被動性負載功能的優點
S120在實際應用中以SLVC模式控制被動性負載時,當激活被動負載功能后,有以下優點:
* 在閉環控制中沒有切換操作(工作穩定、無頻率驟降、轉矩保持恒定)
* 0 Hz 前可一直保持無編碼器的轉速閉環控制
* 在進入 0 Hz 左右的低頻區前可一直保持穩定的轉速閉環控制
* 在靜止狀態下僅會向電機注入勵磁電流,電機可長時間處于靜止狀態
* 相對于開環控制來說,動態響應更快
6ES72882QT160AA0西門子數字量輸出模塊