首頁 >> 供求商機
無萬向節MEMS掃描鏡
光學掃描鏡是一種優秀的矢量掃描設備,能使入射光束按照特定的方式與時間順序發生反射,從而在像面上實現掃描成像.傳統的光學掃描鏡體積大、成本高,且多為散裝,大大限制了其應用。相較于傳統的掃描鏡,MEMS掃描鏡具有尺寸小、成本低、掃描頻率高、響應速度快和功耗低等優點,以被廣泛的應用在光通信、掃描成像、激光雷達、內窺鏡、3D掃描成像等領域。
按照掃描維度不同,可以分為一維掃描鏡和二維掃描鏡,一維掃描鏡是指在鏡面在一個維度內偏轉,二維掃描鏡是指沿著兩個方向同時對光束進行調節。實現二維掃描,可以選用兩個一維的掃描鏡,也可以選用兩個一個二維的掃描鏡。相比較而言二維掃描鏡功能更強大,但是結構也更復雜,控制的難度也就越大。
按照驅動方式的不同,可以分為靜電驅動、電磁驅動、壓電驅動和電熱驅動四種驅動方式。電熱驅動是,利用電能轉換為熱能,再轉換為機械能驅動,其優點是驅動力和驅動位移較大,但是響應速度較慢。壓電驅動是利用壓電材料的壓電效應實現驅動,具有驅動力大、響應速度快等優點,但是壓電材料存在遲滯現象。電磁驅動是利用電磁或者永磁體實現驅動,具有較大的驅動力力和驅動位移,但是響應速度偏慢,且容易受到電磁干擾。靜電驅動是利用帶電導體間的靜電作用力實現驅動,具有功耗低、速度快、兼容性好等優點。是目前使用zui廣泛的驅動方式。下圖給出了各種驅動方式的性能對比
驅動方式 | 速度 | 力 | 幅度 | 電壓 |
壓電驅動 | 快 | 大 | 小 | 高 |
電磁驅動 | 慢 | 大 | 大 | 低 |
熱驅動 | 慢 | 大 | 大 | 較低 |
靜電驅動 | 快 | 小 | 較小 | 高 |
上海昊量光電推出的全部由單晶硅制成,也就是說這種設計使運動部件不包括任何易出故障的部件,例如,金屬、聚合物、壓電材料等。使其擁有的重復性和可靠性。采用擁有的無萬向節設計,使大鏡面尺寸和大角度偏轉的MEMS微振鏡擁有更高的速度。靜電驅動的MEMS掃描微振鏡兩個軸的偏轉角度zui大可達到32°,在滿振幅運轉功耗僅為幾毫瓦。目前靜電驅動的微振鏡可提供的一維和二維的,可提供直徑從0.8mm到5mm微型振鏡。
該款微振鏡針對對點對點(受迫振動)光束掃描進行了特殊設計及優化。該采用靜電驅動且選用整個單晶硅制備而成,因此使得驅動電壓和偏轉角度之間存在良好的一一對應的關系,并且有著的可重復性,而且隨著使用時間的推移依然保持著*的性能。對于開環的微振鏡,致動器在每個軸上至少有14Bits(約16384個位置),因此當機械偏轉角度為-5°到+5°是,角度的分辨率可達到10微弧度。
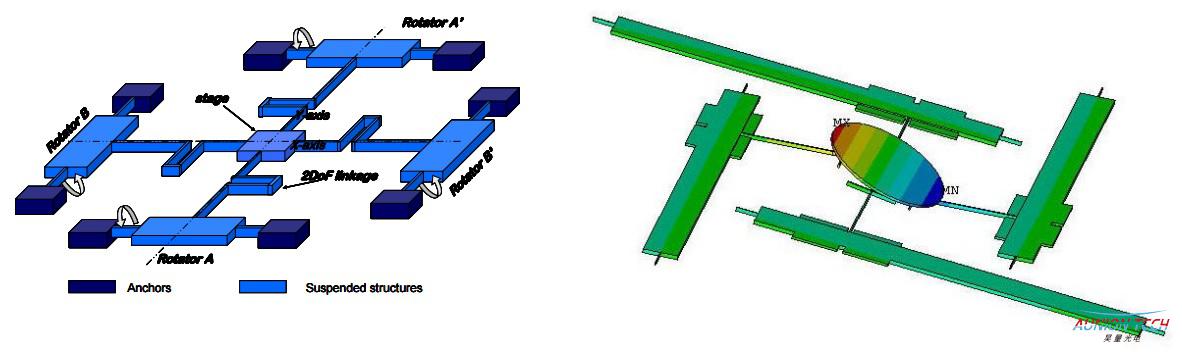
在整片的單晶硅上采用擁有技術的無萬向節設計和*的多級懸梁制造工藝制作一個完整的微鏡促動器。其中采用無萬向節設計可以使微鏡在成像或光束偏轉時可以在兩個軸上達到同樣的高速度。一個普通的擁有0.8mm直徑的微鏡,當機械偏角為-6°到+6°時,非諧振偏轉速度超過1000rad/s,*諧振頻率更是達到3.6KHz。
與常規的MEMS掃描鏡不同的是,該微型振鏡可以在多個模式下工作,即點對點模式(受迫振動)、混合模式和諧振模式。如下圖所示:
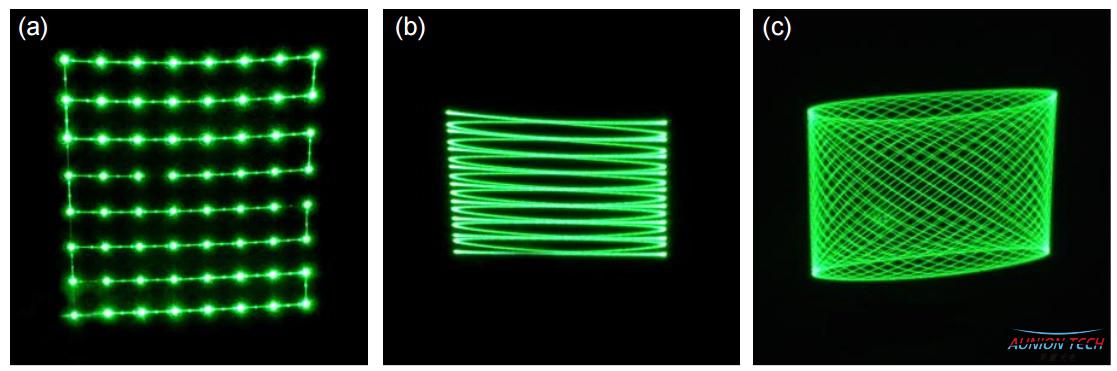
a)這種模式可稱為點對點模式,或者是靜態模式。在這種情況下兩個軸利用設備操作的寬帶寬從直流到某個頻率,并且不允許諧振。因此鏡子可以保持在某一位置,或者以勻速運動或執行矢量圖形等。
b)第二種模式為混合模式,即其中一個軸處于準靜態模式,另外一個軸處于諧振模式
c)第三種模式為諧振模式,這時兩個軸利用狹窄高增益共振來獲得較大的偏角較低的電壓以及較高的速度。設計用于點對點模式的設備,在接近共振或共振時倍驅動,很容易超過安全偏轉角而損壞。因此需要使用非常小的正弦驅動電壓驅動接近諧振工作模式,并且非常仔細的尋找所需要的工作點和角度,以便不超過給定的zui大機械偏角限制。
u 主要特點:
l 大的鏡面尺寸
l 大的光學偏角zui大可達32°
l 重復精度可達到0.001°
l 可實現靜態掃描模式(受迫振動)
u 主要應用:
l 投影顯示裝置
l 掃描成像及激光雷達成像
l 3D跟蹤和位置測量
l 激光打標、雕刻
l 光束偏轉、掃描
u 主要參數:
Integrated Mirror Devices: | Bonded Mirror Devices: |
Mirror Sizes: 0.8 mm, 1.2mm, 1.6mm, 2.0mm, and 2.4mm diameter always in stock. | Bonded Mirror Sizes: 2.0, 2.4, 3.0, 3.6, 4.2, and 5.0mm diiameter n stock, larger possible in special orders. |
Maximum tilt angle under point-to-point driving:-6° to +6° mechanical each axis, varies with design type. | Maximum tilt angle under point-to-point driving: -6° to +6° mechanical on each axis, varies with design type. |
Maximum tilt angle under resonant driving: -7° to +7° mechanical | Maximum tilt angle under resonant driving: -7° to +7° mechanical, varies with design type. |
Surface Roughness: <10 nm rms | |
Driving Methodology: Electrostatic drive, using Mirrorcle's Bias-differential Quad-Channel | |
Mirror Radius of Curvature: >5 m | |
Mirror Coating: Aluminum or Gold | |
Positional repeatability: better than 0.001° (1 millidegrees) at room temperature | |
Operating Temperature: -40°C to 125°C | |
Optical Window: Anti-reflection coated fused silica windows. Removable. | |
Optical power handling: up to 2W any mirror, any wavelength. Above 2W depends on mirror size, coating, and wavelength. E.g. 3W CW blue or green on a 2mm or larger mirror . | |
First resonant rotation frequency: >3 kHz for both axes for small mirror sizes, >1.2kHz for 2.0mm size, etc. | |
u 驅動控制器:

u 開發套件:


 9
9