 化工儀器網
化工儀器網










詳細介紹
西門子CPU313C-2DP通訊模塊
《銷售態度》:質量保證、誠信服務、及時到位!
《銷售宗旨》:為客戶創造價值是我們永遠追求的目標!
《服務說明》:現貨配送至全國各地含稅(13%)含運費!
《產品質量》:原裝產品,*!
《產品優勢》:專業銷售 薄利多銷 信譽好,口碑好,價格低,貨期短,大量現貨,服務周到!
PLS指令移植
S7-200 與 S7-200 SMART 使用PLS指令控制脈沖串輸出(PTO)的SM 定義不同,不能將 S7-200 CPU 編寫的 PLS指令程序直接用于S7-200 SMART。
PLS指令的單段管道化
如表1所示,使用 STEP 7-Micro/Win SMART 打開S7-200 CPU 的 PLS 指令程序需修改控制字節(SM67.6)和更改周期為頻率(SMW68)。
表1. S7-200 與 S7-200 SMART 的SM 對比
| Q0.0 | S7-200 | S7-200 SMART |
| SM67.0 | PTO更新周期 | PTO更新頻率 |
| SM67.1 | 未使用 | 未使用 |
| SM67.2 | PTO更新脈沖計數值 | PTO更新脈沖計數值 |
| SM67.3 | PTO時間基準:0=1μs,1=1ms | 未使用 |
| SM67.4 | 未使用 | 未使用 |
| SM67.5 | PTO操作:0=單段,1=多段 | PTO操作:0=單段,1=多段 |
| SM67.6 | PTO/PWM模式選擇:0=PTO,1=PWM | PTO/PWM模式選擇:0=PWM,1=PTO |
| SM67.7 | PTO啟用:0=禁止,1=啟用 | PTO啟用:0=禁止,1=啟用 |
| SMW68 | PTO周期 | PTO頻率 |
使用 STEP 7-Micro/Win SMART 打開S7-200 CPU 的 PLS 指令程序需修改控制字節(SM67.6)和更改周期為頻率(SMW68)。
例如:在 S7-200 程序里,編寫 500ms/周期(SMB67=16#8D,SMW68=500ms),裝載周期和脈沖的PTO 輸出程序,移植至S7-200 SMART需要修改SMB67=16#C5,SMW68=2Hz。
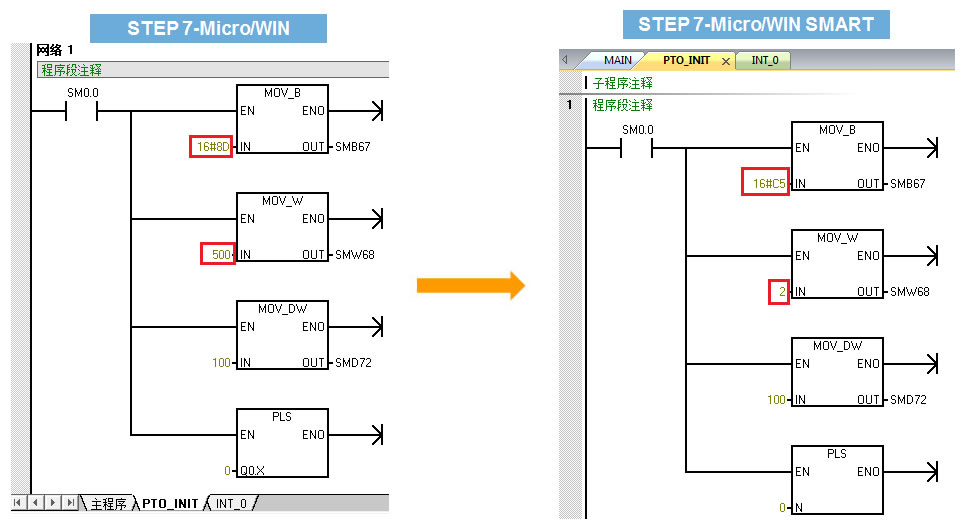
圖1. PLS指令單段PTO移植
 在單段管道化期間,頻率的上限為65,535Hz,如果需要更高的頻率(高為100,000Hz),則必須使用多段管道化。
在單段管道化期間,頻率的上限為65,535Hz,如果需要更高的頻率(高為100,000Hz),則必須使用多段管道化。
PLS指令的多段管道化
相對于 S7-200 多段 PTO 計算周期增量的方式,S7-200 SMART 多段 PTO 設置更簡單,只需要定義起始、結束頻率和脈沖計數即可,如圖2所示。因此移植時需要重新編寫PTO多段管道化程序。
 圖2. 多段PTO操作的包絡表格式對比
圖2. 多段PTO操作的包絡表格式對比
對于依照周期時間(而非頻率)的S7-200項目移植至S7-200smart時,可以使用以下公式來進行頻率轉換:
CTFinal = CTInitial + (ΔCT * PC)
FInitial = 1 / CTInitial
FFinal = 1 / CTFinal
| CTInitial | 段啟動周期時間 (s) |
| ΔCT | 段增量周期時間 (s) |
| PC | 段內脈沖數量 |
| CTFinal | 段結束周期時間 (s) |
| FFInitial | 段起始頻率 (Hz) |
| FFinal | 段結束頻率 (Hz) |
如圖3所示,PLS指令多段PTO移植時無論 S7-200 中定義的SMB67為16#A0(1μs/周期)還是16#A8(1ms/周期),S7-200 SMART中都需要改為16#E0。起始、結束頻率根據公式計算,脈沖數不需要改變。
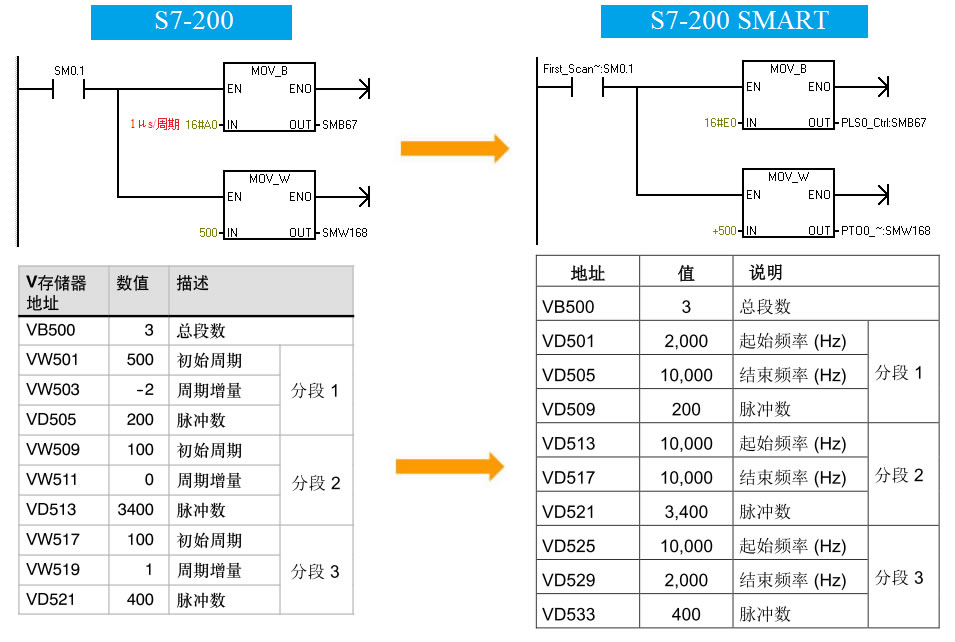
圖3. PLS指令多段PTO移植
計算包絡段的加速度(或減速度)和持續時間有助于確定正確的包絡表值,可按如下公式計算 Ts 段持續時間:
ΔF = FFinal - FInitial
Ts = PC / (Fmin + (|ΔF| / 2 ) )
As = ΔF / Ts
| Ts | 段持續時間 (s) |
| As | 段頻率加速度 (Hz/s) |
| PC | 段內脈沖數量 |
| Fmin | 段小頻率 (Hz) |
| ΔF | 段增量(總變化)頻率 (Hz) |
注意:如果 Ts 段持續時間少于 500 微秒,將導致 CPU 沒有足夠的時間來計算 PTO 段值。 PTO 管道下溢位(SM66.6、SM76.6 和 SM566.6)將置為 1,PTO 操作終止。
S7-200 SMART PTO 脈沖數測量
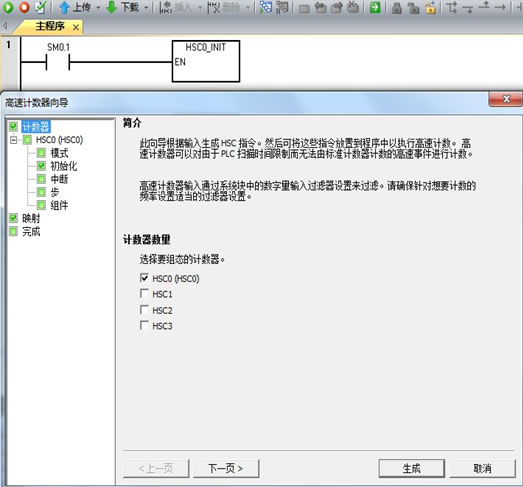
S7-200 SMART CPU 沒有類似 S7-200 CPU 的高速計數器模式 12 功能。
S7-200 SMART CPU 硬件脈沖輸出接到輸入,配置高速計數器向導并調用 HSC 子程序可監視 PTO 脈沖數量 。如下圖4所示:
 西門子CPU313C-2DP通訊模塊
西門子CPU313C-2DP通訊模塊
圖4. S7-200 SMART PTO 脈沖數測量
LOGO ! 0BA8 之間以太網S7通訊
LOGO 從0BA7始支持S7以太網通訊,
LOGO! 設備可作為客戶機來與一或多臺服務器模式下的 0BA8 設備進行通訊。一臺服務器同樣允許一臺或多臺客戶機訪問。
LOGO主從站編程包含電路圖模式和網絡模式兩種方法實現
LOGO 0BA8之間以太網S7協議LOGO客戶機編程(電路圖模式)
編程環境
硬件:主站LOGO! 0BA8 FS04,從站LOGO!0BA8 standard
軟件:LOGO Soft Comfort V8.1.1
1.新建項目,右鍵點擊項目名稱,打開以太網連接(圖.1)
![]()
圖.1
2.新建項目,右鍵點擊項目名稱,打開以太網連接(圖.2)
![]()
圖.2
a.設置本地IP地址和子網掩碼
b.右鍵單擊以太網連接,添加客戶端連接
c.添加S7連接
3.添加傳輸的數據(圖.3)
![]()
圖.3
a.雙擊打開連接1
b.設置遠程服務器的TSAP號碼和IP地址(TSAP參考服務器端設置)
c. 您可在此定義數據傳輸連接的屬性。(讀取:客戶端 <- 服務器,寫入:客戶端 -> 服務器)
您在客戶端連接中多可創建 32 個數據傳輸。
在讀取過程中,本地主機模塊讀取并存儲來自遠程服務器的信息;在寫的過程中,本地主機模塊將數據寫入遠程服務器。您可通過定義對應的列在本地主機模塊或遠程服務器上存儲數據。每一數據傳輸的大傳輸數據長度為 212 字節
點擊下列下拉菜單選擇要傳輸的數據VB,MB,QB,IB(圖.4)
![]()
圖.4
LOGO 0BA8之間以太網S7協議LOGO服務器編程(電路圖模式)
1新建項目,(圖.5)
![]()
圖.5
a.右鍵點擊項目名稱,打開以太網連接
b.添加本地IP地址和子網掩碼
c.添加服務器S7連接
2.設置連接1的服務器參數(圖.6)
![]()
圖.6
a.設置本地的TSAP號碼,勾選接受所有的連接請求。
b.設置遠程的TSAP號碼。點擊確定。
下載程序 ,測試結果。
服務器端(圖.7)
![]()
圖.7
客戶機端(圖.8)
![]()
圖.8
網絡視圖S7協議通訊編程
1.新建項目,添加兩臺新設備,LOGO8 FS4與 LOGO8!standard(圖.9)
![]()
圖.9
a.把兩個CPU使用連線拖動連接,左側CPU為客戶機,右側為服務器,如需調整服務器和客戶機(拖動CPU位置即可)
b.雙擊該連接線,打開數據配置頁(圖.10)
![]()
圖.10
a.自動默認分配相互的TSAP號碼
b.分配數據傳輸的地址和數量
將程序分別下載到對應的CPU,監控測試。
速度控制
V90 PN通過與PLC通信、V90 PTI可以通過模擬量輸入或數字量輸入端子進行速度控制。
V90 PN通過PLC通信實現速度控制
1. 可使用標準報文1,2,3,5,102~105等
2. 如未配置TO工藝對象,可以通過PLC發送控制字及速度給定控制V90以速度方式運行
3. 如配置TO工藝對象,可以通過命令MC_Power及MC_MoveVelocity控制V90以速度方式運行
V90 PTI可以通過模擬量輸入實現速度控制
1. 首先將控制模式修改為速度控制式(S)
2. 數字量輸入信號 SPD1、SPD2 和 SPD3 都處于低電位(0),則模擬量輸 入 1 的模擬量電壓用作速度設定值(10 V 對應大速度設定值p29060)
3. 給出SON伺服運行命令,正轉時給出CWE信號,反轉時給出CCWE信號。
V90 PTI通過數字量輸入信號速度控制
1. 首先將控制模式修改為速度控制(S)
2. 數字量輸入信號SPD1、SPD2 和 SPD3 中至少有一個處于高電位,信號組合選擇一個參數作為速度設定值(P001-P007)
3. 給出SON伺服運行命令
常問問題
 速度模式下,模擬量做速度給定時如何設置電機旋轉方向?
速度模式下,模擬量做速度給定時如何設置電機旋轉方向?
可使用兩個數字量輸入信號控制電機旋轉方向和運行/停止。
? CWE:順時針方向使能
? CCWE:逆時針方向使能。
V90 PTI S模式下上電后運行電機不轉怎么辦?
驅動器給出伺服使能信號(SON=1)后無法運行,有如下可能:
(1)如果給出SON后驅動器READY信號為0:
? 檢查CWL,CCWL,EMGS信號是否為1(高電平),如不接線可通過設置P29300強制信號。
? 檢查驅動器是否有故障或報警
排除上述原因后,重新給出SON信號,設定速度值,驅動器READY信號為1后可給出CWE/CCWE命令控制驅動器運行。
(2)如果給出SON后驅動器READY信號為1:
? 檢查是否給出運行命令CWE/CCWE
? 檢查速度設定值是否正確給出
V90報堵轉F07900?
電機堵轉報警。
? 檢查伺服電機是否能自由旋轉
? 檢查扭矩極限是否設置正確
? 檢查速度實際值是否反向
? 檢查電機編碼器連接

 化工儀器網
化工儀器網