 化工儀器網
化工儀器網










詳細介紹
西門子MM420變頻器總代理
《銷售態度》:質量保證、誠信服務、及時到位!
《銷售宗旨》:為客戶創造價值是我們永遠追求的目標!
《服務說明》:現貨配送至全國各地含稅(13%)含運費!
《產品質量》:原裝產品,*!
《產品優勢》:專業銷售 薄利多銷 信譽好,口碑好,價格低,貨期短,大量現貨,服務周到!
S7-200模擬量模塊選型提示之EM231和224XP
S7-200可以連接的模擬量信號分為電壓、電流和溫度信號。電壓范圍為:0-10V或0-5V等,電流范圍為:0-20mA或4-20mA。可以使用的模擬量輸入模塊的型號為:EM231和EM235。您可以結合被測模擬量信號的范圍和模擬量模塊的特點來進行選型,常見的選型問題如下
Q1: EM231的8通道模塊(訂貨號:6ES7 231-0HF22-0XA0)是否可同時接入8路電流信號?
A1:不可以。對于8通道的EM231而言,其前6個通道只能接入電壓信號,不能接入電流信號。此模塊只有后兩個通道才可以接入電流信號。并且當后兩個通道使用電流信號時,前6個通道的電壓測量范圍必須是0-5V,而不能使用0-10V的信號。
所以,當您需要接入8路電流信號時,只能使用兩個EM231的4通道的模塊(訂貨號:6ES7 231-0HC22-0XA0)
Q2:S7-200 CPU 224XP集成模擬量輸入是否可以連接電流信號?
A2:不推薦這樣連接。224XP集成的模擬量輸入可以連接-10V~+10V的電壓信號。對于電流信號而言是不能直接接入的。在某些情況下,有的客戶會使用電阻進行轉換,將電流變為電壓進行監控。但是,這種方案是不推薦的。主要是由于以下因素導致:
(1)如果使用普通電阻,在使用中由于其阻值會隨著溫度的變化而變化,故測量的精度無法保證。
(2)如果使用精密電阻,當電阻短路時也可能導致傳感器的輸出短路,如果沒有相應的保護,很容易導致設備損壞。
基于以上因素,不建議使用224XP集成的模擬量輸入點連接電流信號。而應該使用EM231(如訂貨號:6ES7 231-0HC22-0XA0)模塊。
Q3:CN的模擬量模塊和非CN的模擬量模塊能否混用?
A3:可以。實際使用中,二者在性能和操作上沒有任何差異。
Q4:S7-200測量0-20mA和4-20mA的電流信號時需要選擇不同的模塊嗎?設置上有差異嗎?
A4:不需要選擇不同的模塊。選擇同一種模塊,如EM231(訂貨號:6ES7 231-0HC22-0XA0)即可實現。對于S7-200模擬量模塊而言,量程設定是通過撥碼開關來實現的,對于4-20mA和0-20mA兩種量程,其撥碼設置是*一樣的。二者的區別是4-20mA對應的數字量范圍是6400-32000。而0-20mA對應的數字量范圍是0-32000。
1. S7-200與S7-200之間有哪些通信方式
S7-200與S7-200之間的通信方式靈活多樣,常用的通信方式有如下四種:
? 網絡讀寫(PPI)通信
? 以太網通信
? 電話網Modem通信
? MD720-3 無線通信
提示:除了以上方式,您也許會想到Modbus通信和自由口通信。這兩種方式可以用于S7-200之間的數據交換,但是不是我們推薦的常用通信方式。因為使用Modbus通信和自由口通信時您需要編寫大量的程序,并無法很好的保證通信的準確性和實時性,Modbus 通信和自由口通信是常用于S7-200CPU與第三方設備或儀表之間的數據交換方式。
1.1 網絡讀寫(PPI)通信
PPI 協議是S7-200的主從通信協議.利用此方式可以實現S7-200與S7-200間的數據交換。這種通信方式利用CPU集成通信口即可實現,配置簡單。通信中,主站設備將請求發送至從站設備,然后從站設備進行響應。具體如下圖所示:

西門子MM420變頻器總代理
實現網絡讀寫(PPI)通信可以使用以下兩種方法:
*,使用Step 7 Micro/Win編程軟件中指令向導中的NETR/NETW向導;
?
具體方法和相關注意事項請參考《西門子 S7-200?LOGO!?SITOP 參考》(更新版)S7-200 PLC->通信->網絡讀寫(PPI)通信。
第二,使用NETR/NETW指令,需要客戶自己編寫程序實現。
詳細的編程設置及例子程序請參考《S7-200可編程控制器系統手冊》第6章S7-200指令集->通信指令->網絡讀寫指令。
提示: NETR/NETW向導使用簡單,不用大量編程,只需按照向導步驟設置參數,因此不易出錯。推薦采用向導的方法實現網絡讀寫(PPI)通信。
使用網絡讀寫(PPI)通信時需要注意以下幾點:
*,只有PPI主站需要配置或編程,從站不需要配置;
第二,主站既可以讀寫從站的數據,也可以讀寫另一個主站的數據;
第三,在一個PPI網絡中,與一個從站通信的主站的個數沒有限制,但是一個網絡中主站的個數不能超過32個;
第四,由于S7-200 CPU集成的通信口是非隔離的。因此在一個PPI通信網絡中,一個網段的距離不能超過50米。如果通訊距離超出50m,應在通信網絡中使用中繼器。如下所示:
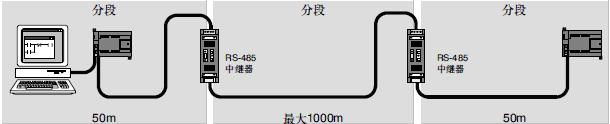
提示:在上圖中,通常擴展一個中繼器可延長通信網絡50米,但如果擴展一對中繼器,并且它們之間沒有任何節點,中繼器之間的距離可達到1000米。
在網絡中使用中繼器的具體方法可參考《S7-200可編程控制器系統手冊》第7章 網絡通信->網絡的建立->在網絡中使用中繼器
1.2 以太網通信
S7-200PLC可以通過智能擴展模塊CP243-1連接至工業以太網中。這樣,S7-200之間就可以通過以太網進行數據交換,如下圖所示:

使用以太網通信需要注意以下幾點:
*,S7-200與S7-200之間采用以太網通信方式必須增加CP243-1以太網通信模塊,且一個S7-200CPU只能連接一個CP243-1擴展模塊;
第二,CP243-1不是即插即用模塊,需先通過Step 7 Micro/Win編程軟件對其組態;
第三,CP243-1可同時與多8個以太網S7控制器通信,即建立8個S7連接。
更多關于CP243-1模塊的使用問題可參考文檔《S7-200 以太網模塊系列 CP243-1》
以太網通信請參考《西門子 S7-200?LOGO!?SITOP 參考》V0.95版(更新版)S7-200 PLC->通信->以太網通信(CP243-1)
S7-200與S7-200之間的以太網通信編程可參考《CP243-1快速入門》《以太網模塊技術手冊》
1.3 電話網Modem通信
S7-200與S7-200之間的電話網Modem通信常用于異地通信,在S7-200與S7-200的本地通信中不常用。
如下圖所示:電話網Modem是通過S7-200 CPU的擴展模塊EM241調制解調器模塊來實現的。在公共電話網或小交換機的模擬音頻系統中,使用電話線連接EM241上標準的RJ11電話接口,對EM241 進行相應的配置編程即可實現S7-200 CPU之間的數據讀取或寫入。

電話網Modem通信(EM241)請參考《S7-200可編程控制器系統手冊》第10章創建調制解調模塊程序
電話網Modem通信注意事項請參考《西門子 S7-200?LOGO!?SITOP 參考》V0.95版(更新版)S7-200 PLC->通信->電話網Modem通信(EM241)
EM241與EM241之間的通信編程請參考《EM241快速入門》
1.4 MD720-3 無線通信
MD720-3無線通信也常用于異地通信,在S7-200與S7-200之間的本地通信中不常用。如有需要通信的模塊在異地或現場不適宜布線等原因,可考慮采用此通信方式。
S7-200與S7-200之間通過MD720-3無線通信模塊可以實現以下兩個功能:
? 終端模式:短消息功能
? OPC模式: 數據交換功能。
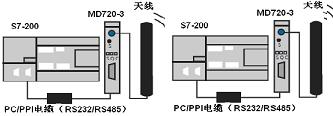
*,如下圖所示:MD720-3 終端模式用于S7-200與S7-200之間互相收發短信。此通信方式不需要OPC中心站,只需要在需要通信的每個S7-200 CPU右側都擴展MD720-3無線通信模塊,配置天線﹑西門子PC/PPI串口電纜等硬件,并且在MD720-3模塊中插入SIM卡。
1.1 概述
無論在帶編碼器矢量控制(VC)和無編碼器矢量控制(SLVC)下,動態優化都是保證控制精度和高動態響應的前提。只有在矢量控制模式(P1300≥20)下,才需要對電機進行動態優化。動態優化包括兩種模式:旋轉測量(包含飽和曲線測量、轉動慣量測量和速度控制器優化)和速度控制器優化(包含轉動慣量測量和速度控制器優化)。
動態識別必須在以下條件下才能完成:
1. 接線正確,并且變頻器和電機沒有絕緣故障;
2. 電機的銘牌參數準確的輸入到變頻器中;
3. 電機在空載狀態下;
4. 電機可以自由旋轉;
5. 靜態識別已經完成。
1.2 相關參數
當執行過旋轉測量以后,不必再執行速度控制器優化。速度控制器優化已經包含在旋轉測量中。如果選擇P1300≥20,并且沒有完成靜態識別,變頻器會報出A07994,提示電機靜態識別未完成。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 1動態優化的參數設置
參數號 | 出廠值 | 描述 |
P1900 | 0 | 電機數據檢測及旋轉檢測 |
P1910 | 0 | 電機數據檢測 |
P1960 | 0 | 1(旋轉測量,無編碼器矢量控制下) |
3(速度控制器優化,無編碼器矢量控制下) | ||
2(旋轉測量,帶編碼器矢量控制下) | ||
4(速度控制器優化,帶編碼器矢量控制下) | ||
P1961 | 40% | 檢測飽和曲線時的轉速 |
P1965 | 40% | 檢測轉動慣量時的轉速 |
P1967 | 100% | 速度控制器優化的動態系數 |
注意:在動態優化過程中,電機會頻繁的加速和減速,可以通過設置P1961和P1965限制優化過程中電機的高轉速;
G120(cu2x0x-2x)變頻器執行動態優化過程中,表1-2中的這些參數會被自動測量和設置,以幫助變頻器提高控制精度和動態響應。其中,轉速控制器適配的說明和使用請參看《G120(CU2x0x-2)轉速控制器適配》文檔。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 2動態優化測量的參數
參數號 | 描述 | 參數號 | 描述 |
r331 | 實際的電機勵磁電流 | P1464 | 轉速控制器適配轉速下限 |
P341 | 電機轉動慣量 | P1465 | 轉速控制器適配轉速上限 |
P342 | 總轉動慣量與電機轉動慣量比 | P1470 | 無編碼器運行時轉速控制器的P增益 |
P360 | 電機勵磁電感 | P1472 | 無編碼器運行時轉速控制器的積分時間 |
P1460 | 轉速控制器P增益適配轉速下限 | P1496 | 加速度前饋定標 |
P1461 | 轉速控制器P增益適配轉速上限比例系數 | r1968 | 轉速控制器優化的動態系數 |
P1462 | 轉速控制器積分時間適配轉速下限 | r1973 | 檢測出編碼器的脈沖數 |
P1463 | 轉速控制器積分時間適配轉速上限比例系數 |
|
|
1.3 動態優化操作步驟
無編碼器矢量控制動態優化操作步驟
當完成變頻器的快速調試以后,進行如下設置:
1、設置P1900=1,P1910=1,P1960=1;
2、此時屏幕上出現報警代碼A07991和A07980,提示靜態識別和動態優化已經激活;
3、啟動變頻器,靜態識別開始,電機發出蜂鳴聲;
4、靜態識別結束后,報警代碼A07991消失,蜂鳴聲消失,變頻器自動停機;
5、再一次啟動變頻器,動態優化開始,電機開始旋轉;
6、動態優化結束后,報警代碼A07980消失,變頻器自動停機;
7、將P0971=1,執行Copy RAM to ROM.
帶編碼器矢量控制動態優化操作步驟
當完成變頻器的快速調試以后,進行如下設置:
1、設置P1900=1,P1910=1,P1960=2;
2、此時屏幕上出現報警代碼A07991和A07980,提示靜態識別和動態優化已經激活;
3、啟動變頻器,靜態識別開始,電機發出蜂鳴聲;
4、靜態識別結束后,報警代碼A07991消失,蜂鳴聲消失,變頻器自動停機;
5、再一次啟動變頻器,動態優化開始,電機開始旋轉;
6、動態優化結束后,報警代碼A07980消失,變頻器自動停機;
7、將P0971=1,執行Copy RAM to ROM.

 化工儀器網
化工儀器網