 化工儀器網
化工儀器網










詳細介紹
哪里賣西門子軟件
追求,追求精確
要通過“嚴格”的檢驗程序,以可編程控制器(PLC)產品為例,在整個生產過程中針對該類產品的質量檢測節點就超過20個。視覺檢測是數字化工廠*的質量檢測方法,相機會拍下產品的圖像與Teamcenter數據平臺中的正確圖像作比對,一點小小的瑕疵都逃不過SIMATIC IT品質管理模塊的“眼睛”。對比傳統制造企業的人工抽檢,這顯然要可靠又快速得多。”
PID 移植
S7-200 SMART 與 S7-200一樣,支持8路PID控制,支持模擬量輸出及PWM輸出
PID 向導移植
將 S7-200 帶有PID向導生成的程序用 S7-200 SMART打開,提示錯誤,如下圖所示:

圖1. S7-200 PID程序在S7-200 SMART 打開報錯
解決方法:
1,新建 S7-200 SMART項目,并進行正確的設備組態
2,將 S7-200程序用STEP 7-Micro/win SMART 軟件打開,將除PID子程序之外的程序段復制到新項目
3,修改新項目的 I/O 地址及模擬量轉換量程與S7-200 SMART 匹配
PID 指令移植
比較 S7-200 與 S7-200 SMART PID回路表,兩者*相同,如下表所示:
表1. S7-200 與 S7-200 SMART PID 回路對比表
偏移 | 類型 | S7-200 | S7-200 SMART |
|---|---|---|---|
| 0 | 過程變量(PVn) | 包含過程變量,其值必須標定在 0.0 到 1.0 之間 | |
| 4 | 設定值(SPn) | 包含設定值,其值必須標定在 0.0 到 1.0 之間 | |
| 8 | 輸出(Mn) | 包含計算出的輸出,其值必須標定在 0.0 到 1.0 之間 | |
| 12 | 增益(Kc) | 包含增益,為比例常數。 可以是正數或負數 | |
| 16 | 采樣時間 | 包含采樣時間,單位為秒。 必須是正數 | |
| 20 | 積分時間 | 包含積分時間或復位,單位為分 | |
| 24 | 微分時間 | 包含微分時間或速率,單位為分 | |
| 28 | 偏置 | 包含偏置或積分和值,介于 0.0 到 1.0 之間 | |
| 32 | 前一過程變量 | 包含上次執行 PID 指令時存儲的過程變量值 | |
| 36 | PID擴展表 | ‘PIDA’(PID 擴展表,版本 A): ASCII 常數 | |
| 40 | AT 控制 | ||
| 41 | AT 狀態 | ||
| 42 | AT 結果 | ||
| 43 | AT 配置 | ||
| 44 | 偏差 | 大 PV 振蕩幅度的標準化值(范圍: 0.025 到 0.25) | |
| 48 | 滯后 | 用于確定過零的 PV 滯后標準化值(范圍: 0.005 到 0.1) | |
| 52 | 初始輸出階躍 | 輸出值中階躍變化的標準化大小,用于使 PV 產生振蕩(范圍:0.05 到 0.4) | |
| 56 | 看門狗時間 | 兩次過零之間允許的大秒數值(范圍:60 到 7200) | |
| 60 | 建議增益 | 自整定過程確定的建議回路增益 | |
| 64 | 建議積分時間 | 自整定過程確定的建議積分時間 | |
| 68 | 建議微分時間 | 自整定過程確定的建議微分時間 | |
| 72 | 實際階躍大小 | 自整定過程確定的標準化輸出階躍大小值 | |
| 76 | 實際滯后 | 自整定過程確定的標準化 PV 滯后值 | |
如上表所示,兩者PID回路表**,所以,當將S7-200 PID 指令編程進行移植時,需將反饋與輸出的模擬量地址按照 S7-200 SMART 的地址分配進行修改,同時修改模數轉換數值即可。如下圖所示:
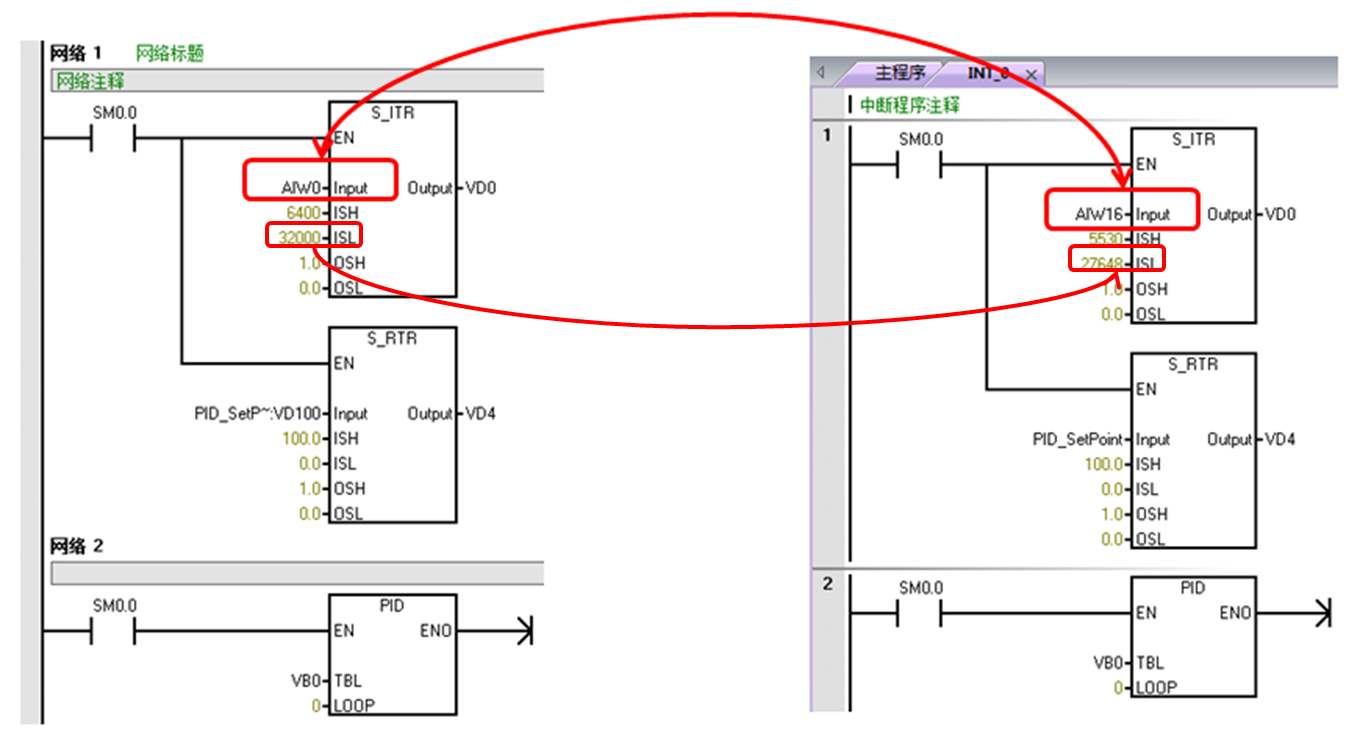
圖2. 程序移植
1 S7-1200與變頻器的連接哪里賣西門子軟件
1.1本例程的系統配置
本例程中用到的硬件: S7-1200(CPU 1214C)、G120 ( 控制單元CU240B-2 )、一臺裝有TIA Portal軟件的PC機、CM1241模塊、電源模塊、標準RJ45網線。
1.2 硬件連接
1.2.1硬件連線
本例程中的硬件間的結構如下圖所示:

圖1-1
1.2.2 PLC與控制單元通信端口之間的連接
用電纜將CU240B-2 Modbus 通訊接口與PLC通信模塊連接起來,如下圖所示。
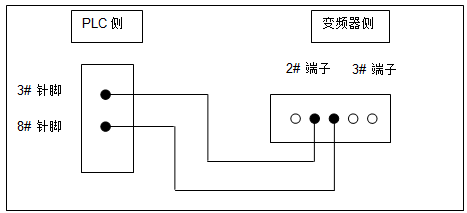
圖1-2
2 變頻器設置
2.1 地址設置
可以通過控制單元上的地址開關,也可以通過參數 P2021 或 STARTER 中“Control Unit / Communication / Field bus”頁面來確定變頻器的 Modbus-RTU 地址。
只有所有地址開關都設為“OFF”(0)時,P2021 或 STARTER 中的設置才有效。否則,Modbus-RTU 地址為地址開關所設置的地址。
2.2 參數設置
除了設置地址之外,還需要對其他一些變頻器的通信參數進行設置,才可以進行MODBUS通信。具體需要設置的參數如表2-1所示:
表2-1
| 參數 | 描述 |
| P0015 = 21 | 變頻器宏程序 選擇 I/O 配置 |
| p2030 = 2 | 現場總線協議選擇 2: Modbus |
| p2020 | 現場總線波特率 設置范圍是 4800 bit/s … 187500 bit/s,出廠為 19200 bit/s |
| p2024 | Modbus 計時
|
| p2029 | 現場總線錯誤統計 指現場總線接口上接收錯誤的統計、顯示 |
| p2040 | 過程數據監控時間 指沒有收到過程數據時發出報警的延時。 注: 該時間必須根據從站數量、總線波特率加以調整,出廠為 100 ms。 |
1 概述
SINAMICS V90固件版本1.05以上開始,伺服驅動器提供了Modbus RTU 通信功能。PLC可以通過 Modbus 的FC3及FC6功能代碼讀取或寫入伺服驅動的寄存器,S7-200 Smart可通過標準的Modbus功能塊完成發送伺服驅動器的控制指令及讀寫驅動的參數。本文詳細描述了S-200 SMART PLC 通過Modbus RTU 通信連接SINAMICS V90實現內部位置的MDI功能。
2 *條件
2.1 使用的硬件
使用的硬件如表2-1所示。
序號 | 設備名稱 | 訂貨號 |
1 | SIMATIC S7-200 SMART CPU ST60 | 6ES7288-1ST60-0AA0 |
2 | V90驅動器 | 6SL3210-5FE10-4UA0(V1.05版本以上) |
3 | 伺服電機 | 1FL6042-1AF61-0LG1 |
4 | 電機及編碼器配套電纜 |
|
表2-1使用的硬件
2.2 使用的軟件
使用的軟件如表2-2所示。
序號 | 描 述 |
1 | Window 7 旗艦版 32位或64位 |
2 | STEP 7-Micro/WIN SMART 編程軟件 |
3 | SINAMICS V-ASSISTANT V1.02 |
表2-2使用的軟件
2.3 通信連接
SINAMICS V90 伺服驅動通過 RS485 電纜與 PLC 連接,使用標準 Modbus 通信協議進行通訊。通過Modbus PLC給V90發送伺服使能和停止命令并且可以讀取伺服驅動器的狀態及故障代碼。
SINAMICS V90 伺服驅動通過 RS485 接口(X12)使用 MODBUS 協議與 PLC RS485(端口 0) 進行通訊,接線如圖2-1所示。

圖2-1 S7-200 SMART CPU 與V90通訊線連接
3 通過Modbus通信實現V90內部位置控制的MDI功能
3.1 V90 Modbus 寄存器說明
V90內部控制的控制數據寄存器如表3-1所示。
寄存器編號 | 描述 | 單位 | 定標系數 | 范圍 |
40100 | IPOS控制模式控制字 |
|
|
|
40932/40933 | MDI 速度設定值 | 1000LU/min | 1 | 1至2147482647 |
40934 | MDI 加速度倍率 | % | 100 | 0.1 至100 |
40935 | MDI 減速度倍率 | % | 100 | 0.1 至100 |
40102 | 位置設定值高字 | LU | 1 | -2147482648至 2147482647 |
40103 | 位置設定值低字 |
表3-1 V90的內部位置控制數據寄存器
IPOS控制模式寄存器 40100控制字的定義如表3-2所示。
位 | 信號 | 描 述 |
0 | SON_OFF1 | 通過上升沿使能伺服,=0時驅動通過斜坡函數發生器停車,脈沖被取消 |
1 | OFF2 | 1:OFF2=1,允許使能 0:OFF2=0,立即取消脈沖 |
2 | OFF3 | 1:OFF3=1,允許使能 0:OFF3=0,快速停車,脈沖被消除 |
3 | OPER | 1:允許運行(脈沖可以被使能) 0:禁止運行(取消脈沖) |
4 | SETP_ACC | 觸發上升沿來接收MDI 設定值 |
5 | TRANS_TYPE SE | 1:立即接收新的設定值 0:通過觸發上升沿來接收新的設定值 |
6 | POS_TYP | 1:定位 0:相對定位 |
7 | RESET | 復位故障 |
8 | 預留 |
|
9 | 預留 |
|
10 | PLC | 使能 PLC 的控制權 |
11 | 預留 |
|
12 | 預留 |
|
13 | SREF | 啟動回參考點(對于p29240=0,通過REF 信號回參考點) |
14 | 預留 |
|
15 | 預留 |
|
表3-2 寄存器 40100控制字的定義
3.2 V90參數設置
按照表3-3設置伺服驅動器的相關參數
參數設置 | 說明 |
P29003=1 | P29003為內部控制模式 |
P29303[0]=3 | 設置DI3為CWL,正限位,連接限位開關為高電平 |
P29304[0]=4 | 設置DI4為CCWL,負限位,連接限位開關為高電平 |
P29004=1 | 設置SINAMICS V90 的MODBUS站地址為1 |
P29007=2 | 設置通信協議為Modbus 協議 |
P29008=1 | 選擇 Modbus 控制源,設定值和控制字來自于 Modbus PZD |
P29009=8 | 設置傳輸波特率為38400 波特 |
表3-3伺服驅動器的相關參數
3.3 PLC的編程
PLC的編程如表3-4所示。
序號 |
|
1 | 初始化Modbus通信接口,需確保 PLC 的波特率與驅動設置*,設置 PLC 校驗方式為偶校驗(parity = 2)。
|
2 | 通過寄存器 40100 寫入需要的控制字。必須設置寄存器 40100 的位 10 為1 以允許 PLC 控制驅動。使能驅動器,先將16進制數 40E 寫入寄存器40100 中,然后再寫入 40F)。
|
3 | 如果需要對帶增量編碼器驅動執行回參考點操作,保持驅動為伺服使能狀態,可通過寫控制字 40100 第13位,執行回參考點操作。 |
4 | 通過MBUS_MSG功能塊,將位置設定值和速度設定值寫入寄存器 40932、40933、40934、40935、40102 和40103 中。
|
5 | MDI相對定位的40100控制寄存器操作:
|
| MDI定位的40100控制寄存器操作:
|
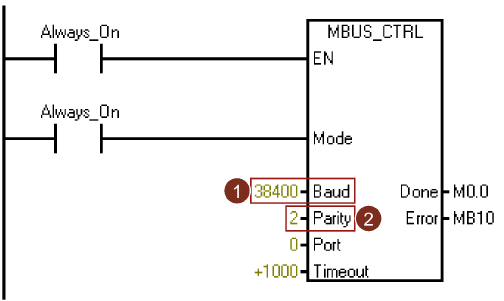


表3-4 PLC的編程

 化工儀器網
化工儀器網