 化工儀器網
化工儀器網










詳細介紹
西門子6AG4112-2LA10-0AA0 西門子6AG4112-2LA10-0AA0
上海盟疆工業自動化設備有限公司在經營活動中精益求精,具備如下業務優勢:
上海盟疆工業自動化設備有限公司*銷售西門子PLC,200,300,400,1200,西門子PLC附件,西門子電機,西門子人機界面,西門子變頻器,西門子數控伺服,西門子總線電纜現貨供應,系列產品,折扣低,貨期準時,并且備有大量庫存. 長期有效
西門子數控伺服系統:802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120數 控 系 統、數 控 伺 服 驅 動 模 塊、控制 模 塊、電 源模 塊、備 品 備 件 等。
本公司產品質量按西門子原廠質量標準,產品質保一年,按西門子原廠包裝標準,西門子原裝 原裝產品,按廠家執行標準,需方收到貨后七日內可提出異議!!!
我們賣的不是價格。賣的是誠信賣的是品質
不經意間,專注從事S5升級S7已經15年了。目觸論壇移植的故事征文,回首過往,感觸良多,隨感而發,與同行共享。
一般只有簡單順序邏輯的S5自動化設備,改造升級是比較容易的。2000初始的那幾年自持有十幾套不同設備成功經驗的自信,在接活時可不像現在想那么多。當時可以說沒有不敢接的活。現在可是三思有底才邁步。在經歷艱險后,人雖增加了底氣,但行事反而更趨謹慎了。
時間回到2008年,設備是重慶電纜廠1992年利用國外**進口的懸鏈線動力電纜生產線。數字量加模擬量約600點,配有工控機作為上位監控。系統不大,沒在意。簽合同前,客戶只說有但沒給上位機資料和數據。等簽了合同拿到SCADA數據后,開始是一楞,麻煩來了。原來上位機監控系統它不是西門子的wincc,也不是常見的Intouch和IFIX,而是一個從來沒見過的意大利AUTOMA公司的產品SUPER-FLASH。資料是意大利語,軟件環境是DOS 6.22,3.55"軟盤載體。我的乖乖,意大利語,雖正眼沒見過幾次,更沒學過,但有靈格斯的幫助下,可以搞定了。可DOS環境和3.55軟盤可要了我的命。這個跨世紀的軟硬件環境可是個大難題。后來才知道我是第四家簽合同,前三家也是栽在這個環境上,始終無法安裝SUPER-FLASH的系統軟件,工作沒辦法深入。好在經過一番努力,傳了一臺古董機,裝好了軟件。哇,當*次進入環境打開數據時,我高興的像叫開了阿里巴巴的芝麻門。這是闖過的*關,雖驚出一身汗,好在有驚無險。都說創新不易,確實如此。但傳古董機的經歷,也讓我感受到考古工作的不易。


第二關是系統的核心工藝:高速行進中懸空電纜的張力控制。難點在于必須恰當地控制好近佰米高速行進電纜的懸空張力,保證電纜懸空通過硫化管道。同時速度還不能波動太大,否則電纜通過注塑模具口后的外套直徑就會超標。這個難題的解決,我要感謝ZANE俠黃岑。我受益于項目之前兩年在一次版主會上與他閑聊中得到的提示。他說高速高精度又穩當的張力控制應該是基速輸出+PID微量調控。這讓我在很短的時間里剖析掌握了原始程序里張力控制的數學模型和程序邏輯。
第三關是客戶生產部提出的施工要求,就是在新的S7程序通過驗證后才能撤除原來的舊件,并且保證在兩個小時內能恢復舊S5系統回到生產狀態。這些要求在技術上沒什么難度。除了在設計和施工時仔細規劃外,在過渡連接件和工裝的準備上費了一些周折。
此外,還經歷了一些溝溝坎坎,比如硫化管道的溫控由PLC控制改為獨立回路控制,然后通過通訊讀回數據,以及連鎖關系的重新搭建。用串口轉profibus網關替代CP524,實現與測徑儀的串口通信。
項目實施過程一直是緊張和壓抑相隨,直到生產穩定出合格產品時,心底蕩漾的就只有一個字:爽!
非原始設備制造商實施的舊設備改造或升級,本質上是產品或設備的逆向工程。雖然不是正向設計,但正向設計的知識和方法沉淀是你成功的捷徑和基礎。其關鍵是吃透設備的工作原理及其實現方式。也就是必須知其然,還要知其所以然。這里邊S5轉S7的工作方法說來也簡單,就是熟讀程序,但不能埋頭死讀程序。我的經驗是先建立全局觀,方法是抓兩頭,剖中間。即根據系統的組成和工藝工作原理,先初步了解那些輸入輸出有關系及什么關系,再逐步在程序里落實其中的具體內容。這并不是說不需要通讀程序,而是在解讀程序之前,先弄清來龍去脈,然后根據一般的控制原理,有方向性的解析原始程序。這樣能事半功倍,不會迷失方向。也能更容易理解源程序工程師的意圖和目的。

老產品的更新升級難辦的就是相關資料的缺失,所以設備業主管理和保存好完整的原始資料非常重要。當然其中控制系統產品廠商的售后支持是*的。好在西門東家對客戶投資的支持是真誠實實在在的到位,S5退市后的二十年來,*堅守不缺,確實讓我們信心倍增。本項目的成功也要感謝西門子持續完善的技術支持體系。
SIMATIC S5作為西門子*代帶微處理的PLC產品,其堅固、耐用是業內有口皆碑的。從上世紀八十年代初至上世紀九十年代末,近二十年里S5叱咤世界自動化領域,風光無限。雖然曾經貴為西方巴黎貿易統籌委員會禁止向東方出口的*產品,但隨著幾十年計算機技術的飛速發展,S5光榮步入退市已經快二十年了。但她可靠、耐用的光輝形象已經永駐我心。I LOVE S5 GAME。

這是前幾個月的事了,一天,我們的技術接到一個用戶的電話,一臺西門子MM430變頻器有故障,故障內容是變頻器的模擬量輸出沒有。下圖是西門子變頻器模擬量輸出的接線端子圖。
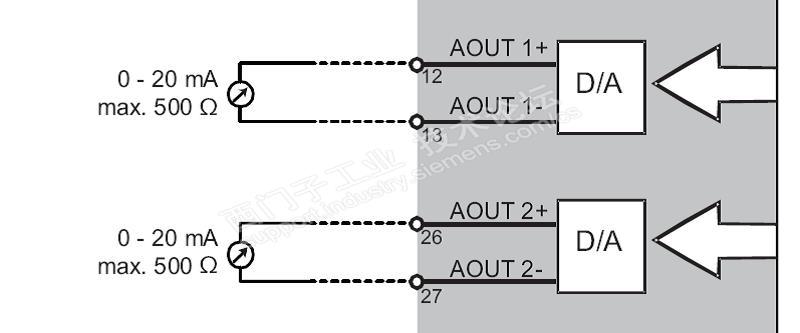
到了現場后看到西門子變頻器 12端 13端 連接的是用戶的模擬量表,斷開12端和13端的導線,單獨測量端子12和端子13之間的阻值是1歐姆左右。馬上告知客戶您的12端和13端的模擬量負載短路了。仔細檢查后發現了問題。下圖是用戶接在變頻器12端和13端的表。

它實際是一塊滿度電流20毫安的純電流表只是把刻度改成了hz,而且是8塊這種表串接放在不同的地方,它們的總電阻加起來也就是1歐姆左右,直接接在變頻器模擬量口,肯定是短路了模擬量口,經檢測模擬量口已經壞了,變頻器一共有兩路模擬量口,另一個口,他們也這樣接過,所以也壞了。
下圖是用戶的圖紙 表HZ 是在柜門上安裝的,HZ1-----HZ7 是在室外。
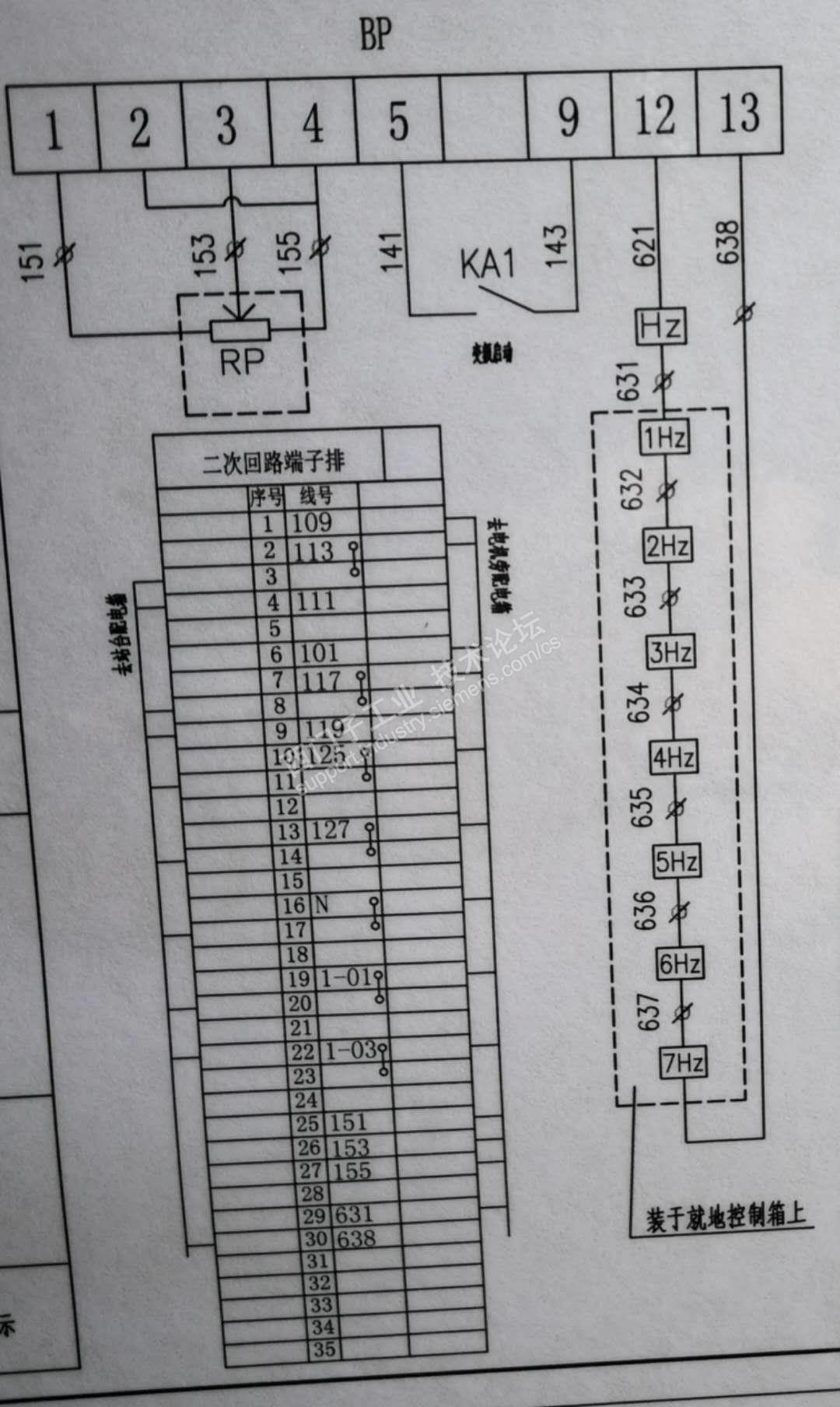
變頻器維修好后,我給用戶說如果還是這個接法模擬量口還會壞,需要改進。
1 表的回路中需要串入500歐姆電阻。
2 多個電流表串聯使用是不準的,雖然可以顯示,因為是多表內阻串聯,誤差大。
后沒辦法,找不到合適的電阻,找了一個近600歐姆的電阻串入了表中,雖然不準,但不會壞變頻器了。
經常有用戶打電話說模擬量輸出口用萬用表電流檔為什么量不出電流,只能告訴用戶測量時要串入500歐姆電阻,不然會壞模擬量口的。
1.1 基本概念
插補的概念源于數控機床。在數控機床中,刀具不能嚴格地按照要求加工的曲線(直線)運動,只能用折線軌跡逼近所要加工的曲線。機床數控系統依照一定方法確定刀具運動軌跡的過程,叫做插補。也可以說,已知曲線上的某些數據,按照某種算法計算已知點之間的中間點的方法,或者稱為“數據點的密化”。插補的動作過程:在每個插補周期(極短時間,一般為毫秒級)內,根據指令、進給速度計算出一個微小直線段的數據,刀具沿著微小直線段運動,經過若干個插補周期后,刀具從起點運動到終點,完成輪廓的加工。
路徑運動初來自于機器人和CNC領域,用機器人編程語言或G-Code編程。它是指在多維空間中,通過一組軸的協作動作,各軸之間無主從之分,它們按照設定的動態響應特性,實現路徑對象從起點到終點的的路徑軌跡運動。
路徑插補產生路徑的運行軌跡,計算插補周期內的路徑插補點,并通過機械運動系統轉換獲得對應插補周期內插補點的各路徑軸設定值。
隸屬于機械運動系統的單獨軸在S7 technology中被為路徑軸,路徑軸通過路徑對象執行路徑運動。參考圖1 路徑軸與路徑對象。
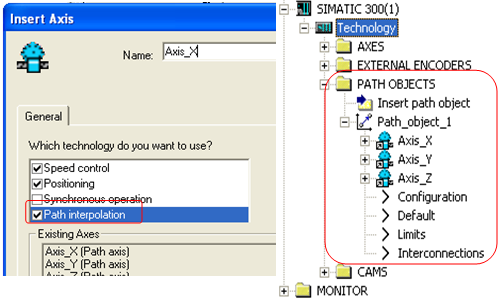
圖1 路徑軸與路徑對象
1.2 S7-Technology 路徑功能特點
S7-Technology 路徑插補功能概述:
> 從S7-Technology V4.2開始
> 允許進行3軸插補操作
> 路徑插補可以通過直線、圓弧、多項式表示實現
> Move Path命令可以組成連續運動
> 支持多種機械運動學模型
> 可以與外部位置值同步,實現傳送帶跟蹤功能
S7-Technology 路徑插補的技術特點:
> 所有的路徑軸都相互同步移動
> 所有的路徑軸都同時到達目標位置
> 路徑軌跡的移動,將會始終是以一個固定的合成速度進行 (如果動態
特性限制沒有被超越)
> 低速度性能的軸,決定了整個軌跡的高動態特性
路徑差補可以執行多3軸之間的2D或者3D的線性、圓弧或者多項式插補,路徑差補工藝對象(TO) ,適用于機械運動學控制范疇,一個共同的系統中,可以存在多個機械運動學控制結構。同步于路徑軸的“同步軸”,仍然可以實現同步控制,例如,旋轉,凸輪開關,測量功能。通過圖形化編輯器,可以簡便地設置機械運動學控制系統的參數;通過動態特性輪廓窗口,可以輕松定義路徑的動態特性;通過軌跡點表格,可以輕松定義路徑差補,計劃目的地路徑。另外還可以定義保護防撞區域和實現傳送帶位置的精確跟蹤。
1.3 機械運動系統的選擇
T-CPU 所實現運動學,等同于人們過去所熟悉機械運動學。可以將它們分為如下兩種不同的類型。參考圖2 在 T-CPU 中集成的機械運動學。
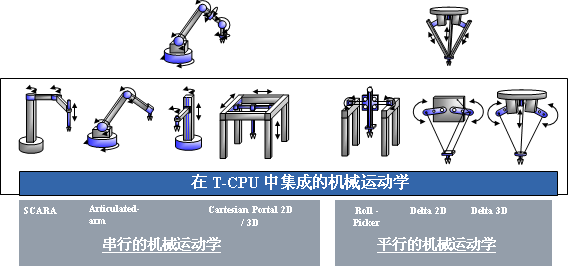
圖2 在 T-CPU 中集成的機械運動學
不同的機械運動系統可以實現TCP (Tool Center Point,工具中心點或機械運動端點)相同的路徑運動功能。盡管在某些情況下,不同的機械運動系統可實現相同的路徑運動,但是,如果機械運動系統選擇不合理,將有可能無法完成的路徑功能。所以,必須根據實際的工藝需求選擇合適的機械運動系統,并在工廠布局中考慮該機構的的合理安裝位置。參考圖3 不同機械系統的轉化。
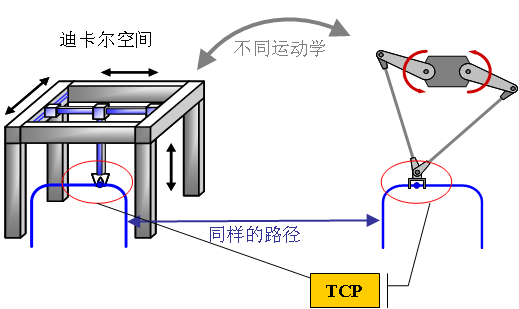
圖3 不同機械系統的轉化
2 路徑插補的實現方法
2.1 運動學模型簡介
常用的運動學模型請參考圖 4 運動學模型。
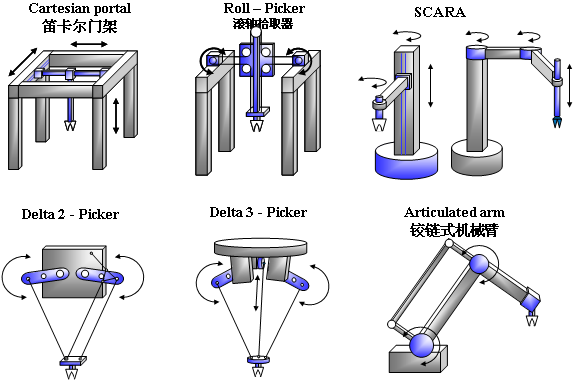
圖 4 運動學模型
下面介紹一些常用的運動學模型。直角坐標機器人 (英文名:Cartesian coordinate robot),大型的直角坐標機器人也稱桁架機器人或龍門式機器人,由多個運動自由度建成空間直角關系的、多用途的操作機器。工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標機器人。
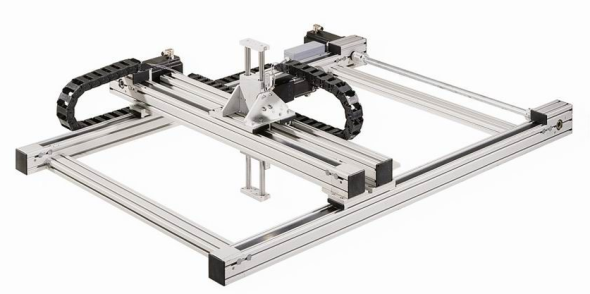
圖5 直角坐標機器人
SCARA 機器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標型的特殊工業機器人。有3個旋轉關節,其軸線相互平行,在平面內進行定位,另一個關節是移動關節,用于完成機械末端在垂直平面的運動。SCARA機器人在x,y方向上具有良好的順從性、靈活性,而在Z軸方向具有良好的剛度,此特性特別適合于裝配工作。SCARA機器人廣泛應用于塑料工業、汽車工業、電子產品工業、藥品工業和食品工業等領域。它的主要職能是搬取零件和裝配工作。 參考圖6 SCARA 機器人。
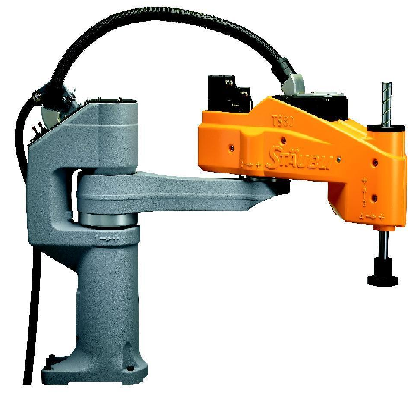
圖6 SCARA 機器人
鉸鏈型機械臂:有很高的自由度,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,可以自由編程,完成全自動化的工作, 提高生產效率;可以代替很多不適合人力完成、有害身體健康的復雜工作,比如,汽車外殼點焊。參考圖 7 鉸鏈型機械臂。

圖7鉸鏈型機械臂
Delta 3D機器人:外形酷似一只蜘蛛,這種*的幾何結構賦予了它們質量輕,強度大,輕便靈活,節省空間,高速,敏捷;適用于高速分揀。參考圖8 Delta 3D機器人。

圖8 Delta 3D機器人
CPU:
6ES7 312-1AE13-0AB0 CPU312,16K內存
6ES7 312-5BE03-0AB0 CPU312C,16K內存
6ES7 313-5BF03-0AB0 CPU313C,32K內存
6ES7 313-6BF03-0AB0 CPU313C-2PTP,32K內存
6ES7 313-6CF03-0AB0 CPU313C-2DP,32K內存
6ES7 314-1AG13-0AB0 CPU314,48K內存
6ES7 314- 6BG03 -0AB0 CPU314C-2PTP
6ES7 314-6CG03-0AB0 CPU314C-2DP
6ES7 315-2AG10-0AB0 CPU315-2DP, 128K內存
6ES7 315-6FF01-0AB0 CPU315F-2DP,192K內存
6ES7 317-2AJ10-0AB0 CPU317-2DP,512K內存
6ES7 317-2EJ10-0AB0 CPU317-2PN/DP,512K內存
6ES7 317-6FF00-0AB0 CPU317F-2DP,512K內存
6ES7 317-6TJ10-0AB0 CPU317T-2DP技術型,512K內存
內存卡:
6ES7 953-8LF11-0AA0 SIMATIC Micro內存卡 64kByte(MMC)
6ES7 953-8LG11-0AA0 SIMATIC Micro內存卡128KByte(MMC)
6ES7 953-8LJ11-0AA0 SIMATIC Micro內存卡512KByte(MMC)
6ES7 953-8LL11-0AA0 SIMATIC Micro內存卡2MByte(MMC)
6ES7 953-8LM11-0AA0 SIMATIC Micro內存卡4MByte(MMC)
6ES7 953-8LP11-0AA0 SIMATIC Micro內存卡8MByte(MMC)
6ES7 951-0KD00-0AA0 FEPROM 內存卡16K
6ES7 951-0KE00-0AA0 FEPROM 內存卡32K
6ES7 951-0KF00-0AA0 FEPROM 內存卡64K
6ES7 951-0KG00-0AA0 FEPROM 內存卡128K
6ES7 971-1AA00-0AA0 鋰電池 3.6V/0.95AH
開關量模板:
6ES7 321-1BH02-0AA0 開入模塊(16點,24VDC)
6ES7 321-1BH50-0AA0 開入模塊(16點,24VDC,源輸入)
6ES7 321-1BL00-0AA0 開入模塊(32點,24VDC)
6ES7 321-7BH01-0AB0 開入模塊(16點,24VDC,診斷能力)
6ES7 321-1EL00-0AA0 開入模塊(32點,120VAC)
6ES7 321-1FF01-0AA0 開入模塊(8點,120/230VAC)
6ES7 321-1FH00-0AA0 開入模塊(16點,120/230VAC)
6ES7 322-1BH01-0AA0 開出模塊(16點,24VDC)
6ES7 322-5GH00-0AB0 開出模塊(16點,24VDC,獨立接點,故障保護)
6ES7 322-1BL00-0AA0 開出模塊(32點,24VDC)
6ES7 322-1FL00-0AA0 開出模塊(32點,120VAC/230VAC)
6ES7 322-1BF01-0AA0 開出模塊(8點,24VDC,2A)
6ES7 322-1FF01-0AA0 開出模塊(8點,120V/230VAC)
6ES7 322-5FF00-0AB0 開出模塊(8點,120V/230VAC,獨立接點)
6ES7 322-1HF01-0AA0 開出模塊(8點,繼電器,2A)
6ES7 322-1HF10-0AA0 開出模塊(8點,繼電器,5A,獨立接點)
6ES7 322-1HH01-0AA0 開出模塊(16點,繼電器)
6ES7 322-5HF00-0AB0 開出模塊(8點,繼電器,5A,故障保護)
6ES7 322-1FH00-0AA0 開出模塊(16點,120V/230VAC)
6ES7 323-1BH01-0AA0 8點輸入,24VDC;8點輸出,24VDC模塊
6ES7 323-1BL00-0AA0 16點輸入,24VDC;16點輸出,24VDC模塊
模擬量模板:
6ES7 331-7KF02-0AB0 模擬量輸入模塊(8路,多種信號)
6ES7 331-7KB02-0AB0 模擬量輸入模塊(2路,多種信號)
6ES7 331-7NF00-0AB0 模擬量輸入模塊(8路,15位精度)
6ES7 331-7HF01-0AB0 模擬量輸入模塊(8路,14位精度,快速)
6ES7 331-1KF01-0AB0 模擬量輸入模塊(8路, 13位精度)
6ES7 331-7PF01-0AB0 8路模擬量輸入,16位,熱電阻
6ES7 331-7PF11-0AB0 8路模擬量輸入,16位,熱電偶
6ES7 332-5HD01-0AB0 模擬輸出模塊(4路)
6ES7 332-5HB01-0AB0 模擬輸出模塊(2路)
6ES7 332-5HF00-0AB0 模擬輸出模塊(8路)
6ES7 332-7ND02-0AB0 模擬量輸出模塊(4路,15位精度)
6ES7 334-0KE00-0AB0 模擬量輸入(4路RTD)/模擬量輸出(2路)
6ES7 334-0CE01-0AA0 模擬量輸入(4路)/模擬量輸出(2路)

 化工儀器網
化工儀器網