 化工儀器網
化工儀器網










詳細介紹
西門子6SL3120-1TE32-0AA0
6SL3120-1TE32-0AA0
SINAMICS 單電機模塊 輸入:600V DC 輸出:3AC 400V,200A 內部風冷 包含 DRIVE-CLiQ 電纜
描述

通過全新按鍵面板 KP8/KP8F,SIMATIC HMI 以有利的價格提供了專門為 PROFINET 環境而設計的緊湊型小鍵盤操作員面板。八個較大的符合人體工程學的按鍵,分別由五種不同顏色來指示,從而形成一個裝置。對于較大的控制面板,您可以無間隙添加其他裝置,并通過集成以太網交換機進行電氣連接,通過 24 V 直流電建立回路。針對與安全相關的應用,還存在故障防護型種類 KP8F
應用領域

Enlarge
這些堅固耐用的按鍵面板是為簡單直接的機器操作而設計的。在沒有按鍵和燈具就無法執行 HMI 功能的任何地方都可以使用,例如機器和工廠的控制臺。按鍵面板的格式具有選擇性,以便它們也可以*地安裝到全封閉 HMI 設備的擴展裝置中。
優勢
節省多達 90 % 的布線時間
按鈕和燈具具有更少的數字輸入/輸出模塊
由于只連接了一個標準總線電纜,因此不會出現配線錯誤
集成以太網交換機,用于設置總線型和環型拓撲結構
可*地安裝到全封閉 HMI 設備的擴展裝置中
提供故障防護型版本
設計和功能
SIMATIC HMI KP8 可以提供 8 個較大的照明按鈕,而且這些按鈕可用標簽條輕松標記。這些按鍵具有觸覺反饋功能,因此,即使佩戴有手套也可以進行可靠操作。您可以設置五種顏色(藍、綠、紅、黃和白),并且可以通過 STEP 7 硬件組態設置按鍵的亮度。其背面有 8 個 I/O 插針,這些插針可用于連接其他控制裝置。 這些按鍵面板可以無間隙地安裝在一起,借助于集成以太網交換機,這些裝置可以成為總線型拓撲的一部分,甚至可以建立 24V 直流電回路。
按鍵面板 KP8F - 故障防護型版本
借助于集成 PROFIsafe 通信,該按鍵面板可以和 SIMATIC S7-300F/400F 一起用于簡易緊急停止應用的故障防護型操作。KP8F 的兩個額外的故障防護型輸入可以使用兩個緊急停止按鈕來實現 SIL 2。如果一個緊急停止按鈕只連接到一個輸入,可以實現 SIL 3。KP8F 可以由兩個故障防護型控制器通過共享設備 PROFINET 功能來處理。
技術數據
設備 | KP8 |
|---|---|
按鍵數量 | 8 |
指示燈顏色 | 紅、黃、綠、藍、白 |
數字量輸入 | 8(KP8F 有 2 個額外的故障防護型輸入) |
數字量輸出 | 8 |
接口 | 2 個具有集成交換機的 RJ45 以太網 |
防護等級 | 正面 IP 65(如果安裝),背面 IP 20 |
前面板 | 98 x 155 mm(寬 x 高) |
安裝開孔 | 68 x 129 mm(寬 x 高) |
深度 | 49 mm |
目前CU310 DP、CU310 PN、CU320支持的新固件版本為V2.6 SP2 HF11。CU320-2DP支持的新固件版本為V4.3 SP2。SINAMICS S120的固件保存在CF卡中,固件升級需要對CF卡進行操作。CU320-2DP是新一代控制單元,它的CF卡與上一代控制單元是不通用的,所支持的版本也不同,如下圖所示。
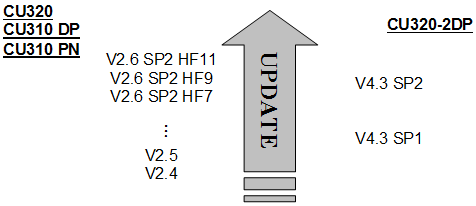
圖1 控制單元與固件版本
在不更換硬件的情況下,可以對控制單元的固件進行升級。本文以CU320為例,介紹了從V2.5升級成V2.6.2的步驟,CU310、CU320-2DP的固件版本升級步驟與之類似。
如果要將CU320項目升級成CU320-2DP,而保留原有項目數據,請參考下載中心應用文檔F0479。
1 準備條件
在升級前,需要滿足以下條件:
- 硬件需求
a) CF卡讀卡器
b) 調試用PG/PC,比如帶CP5512的筆記本電腦
c) S120控制單元,要支持新的Firmware
> CU310 DP(6SL3040-0LA00-0AA1)和CU310 PN(6SL3040-0LA01-0AA1)都支持V2.5或以上版本的Firmware
> CU320(6SL3040-0MA00-0AA1 )硬件版本C或以上 - 軟件需求
a) STARTER V4.1 SP3或以上,或SCOUT V4.1 SP3或以上
b) 新的Firmware
對于2.4及以上版本的固件可以完整的裝載到64MB的CF卡上,V2.4及以上的CF卡都是足夠大的。如果要把2.4及以上版本的固件裝載到32MB的CF卡(帶V2.2或V2.3固件的CF卡)上,要先刪掉 …SIEMENSSINAMICSDATADESC文件夾里的AOP語言文件,再裝載到CF卡上。2.4及以上版本的固件不能夠裝載到16MB(比如版本為V2.1)的CF卡上。
2 升級步驟
如果要對CU的固件版本進行升級,可按照以下步驟進行:
- 備份原有項目
- 刷新CF卡
- 離線升級項目
- 在線下載項目
2.1 備份原有項目
1. 連接PG/PC到驅動器,比如通過Profibus DP。
2. 打開STARTER,創建新項目,在線并上載原項目數據,并做好備份。
2.2 刷新CF卡
1. 驅動器設備斷電。
2. 取出CF卡,并使用讀卡器將其連到電腦上,備份CF卡內原有數據。
3. 刪除CF卡內所有數據,如果有KEYS文件夾,則保留這個文件夾。注意不要使用格式化功能。
4. 將新版本的Firmware拷貝到CF卡根目錄下。
5. 將CF卡插入驅動器,并重新上電。
2.3 離線升級項目
使用STARTER打開原有項目文件,在左側導航欄右鍵點擊驅動單元,依次選擇“Target Device” ? “Device Version”,如下圖所示。

圖2 STARTER軟件視圖
從彈出的窗口中選擇新版本,并點擊Change Version按鈕。
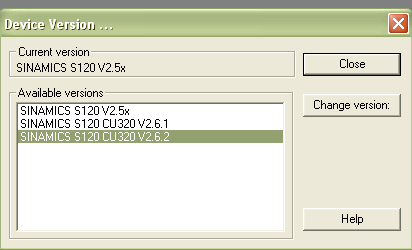
圖3 選擇升級版本
然后會彈出版本升級的警告窗口,點擊“Yes”。

圖4 升級時的警告窗口
如果此時有別的STEP7應用程序在運行,還會彈出下面的提示窗口,要求關閉所有其他STEP7應用程序。點擊“Yes”,程序會自動關閉所有STEP7應用程序。
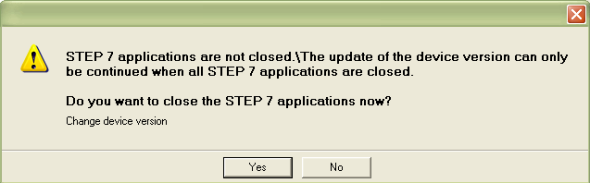
圖5 關閉STEP7應用程序時的警告窗口
然后在窗口下部的狀態欄會顯示項目升級的狀態,升級完畢后,會出現“Successfully completed”的提示。

圖6 升級完成后的提示
2.4 在線下載項目
1. 使用STARTER重新連接驅動器,并在線。
2. 下載升級后的項目數據。
3. Copy RAM to ROM。
下載完成后,在Alarms欄會出現驅動器組件正在升級的提示A01306。

圖7 組件升級時的提示
升級完畢后,在Alarms欄出現要求重新上電的提示A01007。

圖8 組件升級完畢后的提示
重新上電后,設備升級完成。
一、概述
S120 有兩種形式:
用于多軸系統的 DC/AC 裝置
用于單軸系統的 AC/AC 裝置
這兩種形式的 Firmware V2.4 及以上版本都已具備基本定位功能。當前V2.4 版本的 S120具有如下定位功能:
? 點動 (Jog): 用于手動方式移動軸,通過按鈕使軸運行至目標點
? 回零 (Homing/Reference):用于定義軸的參考點或運行中回零
? 限位 (Limits):用于限制軸的速度、位置。包括軟限位、硬限位
? 程序步 (Traversing Blocks): 共64個程序步,可自動連續執行一個完整的程序也可單步執行
? 直接設定值輸入/手動設定值輸入 (Direct Setpoint Input / MDI):目標位置及運行速度可由上位機實時控制。
使用 S120 基本定位功能的前提條件:
調試軟件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本
注:
安裝 SCOUT V4.0 需要STEP 7 版本至少為 V5.3.3.1 以上
二、激活基本定位功能
S120的定位功能必須在變頻器離線配置中激活,步驟如下:
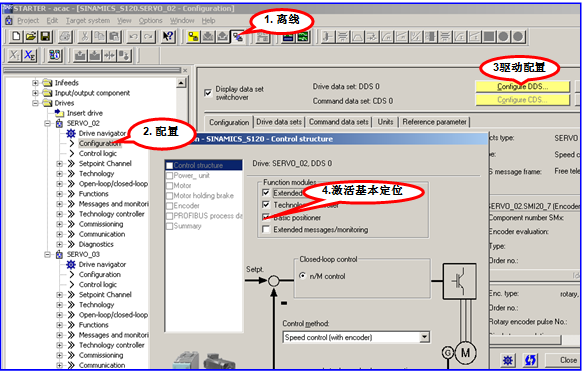
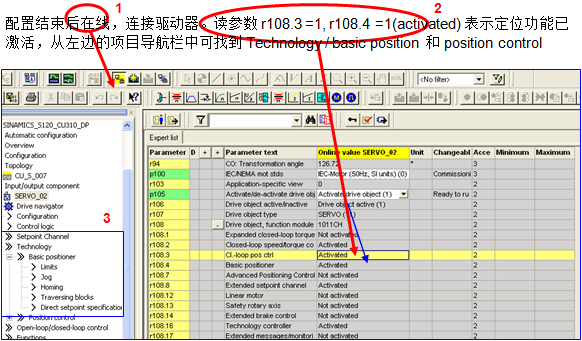
定位功能激活后可使用STARTER中的控制面板或專家參數表進行設置
定位功能激活后可使用STARTER中的控制面板或專家參數表進行設置
使用控制面板 使用專家參數表
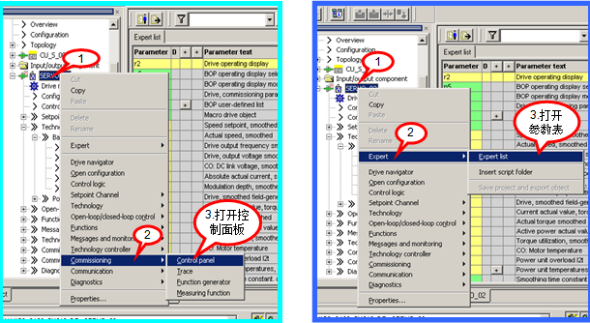
使用控制面板的操作步驟:
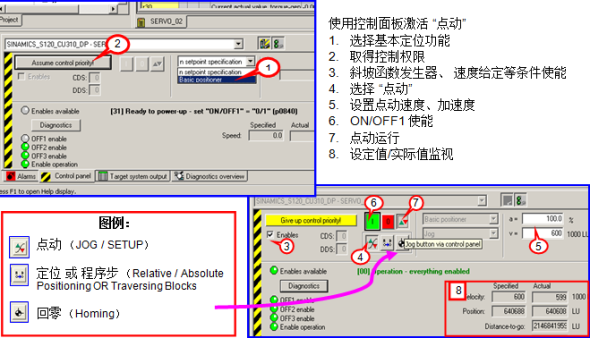
三、基本定位_點動(JOG)
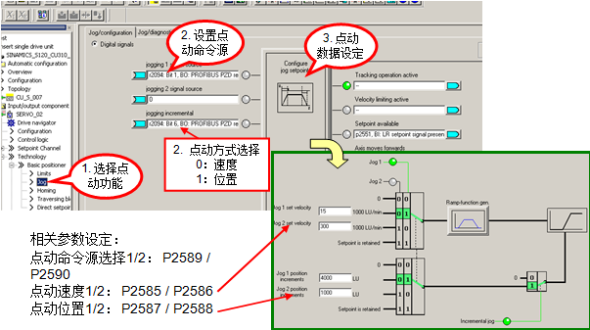
S120 中基本定位功能的點動有兩種方式:
? 速度方式( travel endless):點動按鈕按下,軸以設定的速度運行直至按鈕釋放。
? 位置方式( travel incremental):點動按鈕按下并保持,軸以設定的速度運行至目標位置后自動停止。
? 使用控制面板的點動功能僅限于速度方式,位置方式需使用專家參數表設定。
? 執行點動功能,應先使能變頻器ON/OFF1(P0840)
 西門子6SL3120-1TE32-0AA0
西門子6SL3120-1TE32-0AA0
四、基本定位_回零(Homing / Reference)
回零/尋參(Homing / Reference)
回參考點模式(回零模式)只有使用增量編碼器(旋轉編碼器 Reserver、正/余弦編碼器Sin/Cos 或 脈沖編碼器)時需要,因每次上電時增量編碼器與軸的機械位置之間沒有任何確定的關系。因此軸都必須被移至預先定義好的零點位置。即執行 Homing 功能。
當使用編碼器 ( Absolute ) 時每次上電不需重新回零。
S120 中回零有三種方式:
? 直接設定參考點 (Reference): 對任意編碼器均可
? 主動回零 (Reference point approach): 主要指增量編碼器
? 動態回零 (Flying Reference):對任意編碼器均可
4.1設置參考點 (Set_Reference)
通過用戶程序可設置任意位置為坐標原點。通常情況下只有當系統即無接近開關又無編碼器的零脈沖時,或者當需要軸被設置為一個不同的位置時才使用該方式
操作步驟(已設定開關量輸入點 DI2 為ON/OFF1命令源 P840)
1. 進入“Homing”
2. 連接一數字量輸入點 ( DI 1 )至參數 P2596作為設置參考點信號位,該位上升沿有效
3. 設定參考點位置坐標值 P2599(如 0)
4. 閉合DI 2運行使能
5. 閉合DI 1 激活“設置參考點”命令,于是該軸當前位置 r 2521 立即被置為P2599 中設定的值。如 r2521=0
4.2主動回零(Active Homing)
主動回零方式只適用于增量編碼器,值編碼器只需在初始化階段進行一次編碼器校準,以后不必做回零
主動回零有三種方式:
僅用編碼器零標志位( Encoder Zero Mark ) 回零
僅用外部零標志( External Zero Mark ) 回零
使用接近開關 + 編碼器零標志位( Homing output cam + Zero Mark ) 回零
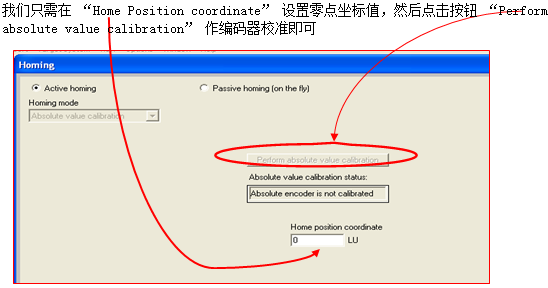
4.2.1值編碼器的主動回零
如果我們使用值編碼器并且作主動回零時會看到如下頁面:
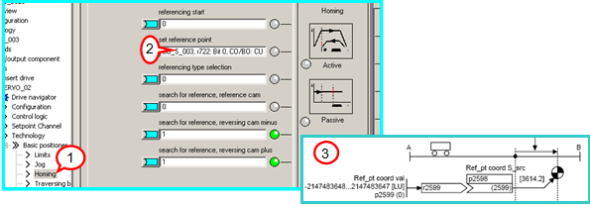
4.2.2增量編碼器的主動回零
依下圖所示進行配置
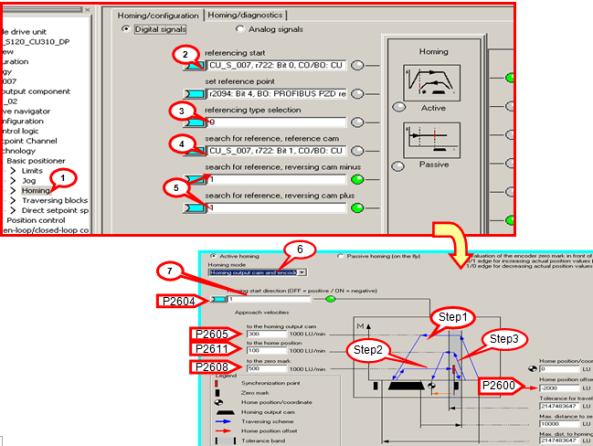
相關參數設定
1. 進入 “ Homing “ (回零) 頁面
2. 定義開關量輸入點DI 1為開始尋參命令(參數P2595=722.0)
3. 回零方式選擇主動回零P2597=0
4. 定義開關量輸入點DI 2為接近開關 P2612= 722.1(粗脈沖)
5. 軸運行極限點,如果回零過程中極限點到達(P2613/P2614=0)則軸反轉。若兩點全為零則軸停止。
6. 回零方式:接近開關 + 編碼器零脈沖
7. 回零開始方向P2604 (0:正向;1:反向)
動作過程:
變頻器運行ON/OFF1閉合,DI 1閉合,開始尋參過程
? 上圖中(Step1)軸按照P2604 定義的搜索方向,以大加速度 P2572 加速至搜索速度 P2605,到達接近開關后(DI 2 閉合),以大減速度P2573減速停止,進入下一步:搜索編碼器的零脈沖
? 軸反向加速至速度 P2608,離開接近開關后(DI 2 斷開)遇到的編碼器的*個零脈沖后軸停止。進入下一步:回參考點
? 上圖中(Step3)軸反向加速以速度 P2611運行偏置距離P2600后停止在參考點,完成主動回零過程。
4.3動態回零(Passive Homing)
Passive Homing (動態回零)又稱為 Homing on the fly
動態回零用于軸工作于任意定位狀態時動態修改當前位置值為零(如:在點動時、執行程序步時,執行 MDI 時),執行動態回零后并不影響軸當前的運行狀態,軸并不是真正的回到零點而只是其當前位置值被置為0,重新開始計算位置。
前提條件:P2597=1
值編碼器的動態回零:

參數設定
? 打開 “ Homing “ (回零) 頁面
? 定義開始尋參命令P2595源(如開關量輸入點DI2)
? 回零方式選擇動態回零P2597=1
? 接近開關Bero為上升沿有效(如上圖中P2511)
? 定義開關量輸入點DI 10(只能為快速I / O)為接近開關 P488= 722.10(如上圖中2)
動作過程:
? 變頻器運行(使能ON/OFF1),選擇任意一種命令(如點動,程序步、MDI等)軸按照所選擇的方式運行
? 閉合DI 2,開始動態回零
? 閉合快速開關DI 10(下圖中紅色線為該開關狀態),可見到位置實際值立即恢復為0,后重新計值(如圖中綠色線所示),在整個動態回零過程中軸的運行速度不受影響。

五、基本定位_限位(Limit)
S120 中包含兩種限位功能:軟限位、硬限位。以限制軸運行范圍。同時還有對軸運行速度,加減速的限制。
如下圖所示激活限位方式
? 項目導航欄中選擇限位功能塊
? 激活軟限位P2582 =1,正/反向位置范圍通過 P2578, P2579設定
? 激活硬限位P2568 =1,硬限位位置開關源 P2569, P2570
? 大速度:P2571、大加速度:P2572、大減速度:P2573

注:限位開關信號為 “ 低 “ 有效
到達硬限位后軸將以大減速度 P2573 故障停車,即使故障復位后也只允許反向運行
六、基本定位_程序步(Traversing Blocks)
通過使用Traversing Blocks _ “程序步” 模式可以自動執行一個完整的定位程序,也可實現單步控制;各程序步之間可通過數字量輸入信號切換。但只有當前程序步執行完后下一程序步才有效。
在S120 中提供了多 64個程序步供使用。

程序步執行步驟:
1. 項目導航欄中選擇 Traversing Blocks 模式,設定開關量輸入點DI4用于激活程序步功能
2. 不拒絕任務 P2641= r722.2=1、沒有停止命令 P2640=1
運行過程中P2640=0發出停止命令,則軸將以減速度P2620減速停車。
若斷開DI 3 ( r722.2=0 )發出拒絕任務命令,則軸將以大減速度P2573減速停車。
3. 按工藝需要設定各個程序步參數,程序步代號決定程序的執行順序。代號為 -1表示該步不執行(初始代號全部為 -1)。
4. 通過6個數字量輸入點的不同組合選擇需要的程序步
5. 變頻器運行,閉合DI 4(r722.3=1)激活 Traversing 方式 ( P2631=1有效 )軸按設定步驟運行。

結構說明:
P2616 (No.) 每個程序步都要有一個任務號,運行時依此任務號順序執行 ( -1 表示無效的任務)
P2621 (Job ) 表示該程序步的任務。有7 種任務供選擇:Positioning (位置方式)、Endless_POS / Endless_NEG(正 / 反向速度方式)、Waiting(等待parameter 中的時間后執行下一步) Goto(跳轉到parameter中的程序步) Set_O / Reset_O(置位/復位parameter 中的開關量輸出點)
P2622 ( Parameter ) 依賴于不同的Job,對應不同的Job有不同的含義(參見List Manual)
P2623.8/9 ( Mode ) 定義定位方式,僅當任務 ( Job )為位置方式 ( Position ) 時有效
P2617/P2618/P2619/P2620 ( Position, Velocity, Acceleration, Deceleration ) 運動的位置,速度,加/減速
P2623.4/5/6 ( Advance ) 制定本任務結束方式。END: 本任務結束不連續執行下一任務,Continue_With_Stop: 本任務結束準確定位,電機停止后重新啟動開始下一任務。Continue_Flying: 本任務結束連續執行下一任務。
P2623.0 ( Hide ) 跳過本條程序步不執行該任務。
依賴于 Job 的方式,Configuration of digital output 僅當Job 設定為 SET_O / RESET_O時有效,用于設定開關量輸出。
示例:
編制一段程序:
以速度 700 LU/min, 加 / 減速為100% 運行相對位置 50000 LU 減速停止;等待 30ms;再以速度 600 LU/min, 加 / 減速為100% 運行相對位置 40000 LU 減速停止。
編制程序步如下:


七、手動數據輸入(MDI)
Direct Setpoint Input / MDI (直接設定點輸入方式/手動數據輸入方式), MDI 的縮寫來自于 NC 技術“Manual Data Input ”
使用MDI 功能我們可以很輕松地通過外部控制系統來實現復雜的定位程序,通過由上位機控制的連續變化的位置、速度來滿足我們的工藝需要。
MDI 有兩種不同模式:
? 位置 ( position) 模式 P2653=0、
? 手動定位或稱速度模式( setting up ) P2653=1這兩種模式可在線切換
速度模式是指軸按照設定的速度及加/減速運行,不考慮軸的實際位置。
位置模式是指軸按照設定的位置、速度、加/減速運行;
位置模式又可分為位置 (P2648=1)和 相對位置( P2648=0)兩種方式。
7.1 MDI 模式配置如下圖所示

7.2 激活 MDI 方式及參數配置
1. 進入直接數據輸入/ MDI 模式
2. 如上面程序步中所述:不拒絕任務 P2641=1、沒有停止命令 P2640=1
運行過程中可通過斷開聯接與P2640的外部開關發出停止命令,則軸將以減速度P2620減速停車。
若斷開聯接與P2641的外部開關發出拒絕任務命令,則軸將以大減速度P2573減速停車
3. 設定開關量輸入點DI 9用于激活MDI功能(P2647為“1”有效)
4. 相關數據設置位置、速度、加 / 減速度 P2642 ~ P2645)

5. 位置模式選擇 P2653
P2653=1:速度方式;P2653=0:位置方式
6. 定位方式選擇 P2648
位置方式:P2654=0, P2648=1;相對定位方式:P2654=**1*(16H)
7. 方向設定源 P2651、P2652
8. 數據傳輸形式 (P2649) 及數據設定值確認命令源( P2650)
S120 中MDI 的數據傳輸可采用兩種形式:
連續傳輸 P2649=1
單步傳輸、由上升沿確認 P2649=0
? 所謂單步傳輸是指MDI 數據的傳輸依賴于參數 P2650 中選擇的開關量信號。該命令為 “沿” 有效,每次執行完一個機器步后,需要再次施加上升沿,新的速度、位置等才能有效。
? 與單步傳輸不同,一旦激活連續數據傳輸,MDI 數據(位置、速度、加 / 減速度)可連續修改且立即有效而無需開關使能。這樣我們就可通過上位機實時調整目標位置及軸的運行速度、加 / 減速度而不會停機
注:連續數據傳輸僅適用于定位方式
7.3 調試參數
運行命令源 (ON/ OFF1)為 P840
不拒絕數據傳輸: P2641=1
無停止命令: P2640=1
MDI 位置模式: P2653=0/1
選擇傳輸模式: P2649=0/1
數據設定值確認命令源 P2650 ( P2649=1時無效)
激活MDI 模式的命令源 P2647
選擇定位方式: P2648=1
設置目標參數:P2690、P2691、P2692、P2693
變頻器運行后,激活MDI模式,軸按設定值運行。

 化工儀器網
化工儀器網