 化工儀器網
化工儀器網










詳細介紹
天津西門子代理商
上海盟疆有限公司工業業務領域致力于為客戶提供高品質的服務,追求客戶的滿意是我們始終如一的目標。在中國,工業業務領域擁有一支技術過硬、經驗豐富的工程師隊伍,為客戶提供7x24小時全天候服務。專業的服務人員和遍布全國的服務及備件網絡將對客戶的服務需求迅速作出響應,將由設備故障引起的損失降低到小的程度。
現場服務
現場服務是指工程師到達客戶現場提供安裝指導、運行調試、維護維修、故障清除、技術升級等服務。
返廠維修服務
返廠維修服務是指客戶將故障裝置以“門到門”的方式發送到維修中心進行維修。 與現場服務相比,返廠維修服務的費用更加低廉, 主要適合小尺寸的裝置(大尺寸的裝置在實驗室內無法完成帶載試驗)。
保內更換服務
保內更換服務是指針對部分在保修期內發生故障的裝置,我們將為您更換一個功能完好的裝置。
備件*
我們在國內擁有工業業務領域產品備件庫,可以隨時為您提供主流產品的備件。通過選擇快捷專業的物流運輸,可以大限度地確保備件準確快速地送達客戶手中。
SIMATIC S7-200 SMART 產品亮點

機型豐富,更多選擇
提供不同類型、I/O點數豐富的CPU模塊,單體I/O點數高可達60點,可滿足大部分小型自動化設備的控制需求。另外,CPU模塊配備標準型和經濟型供用戶選擇,對于不同的應用需求,產品配置更加靈活,大限度的控制成本。

選件擴展,精確定制
新穎的信號板設計可擴展通信端口、數字量通道、模擬量通道。在不額外占用電控柜空間的前提下,信號板擴展能更加貼合用戶的實際配置,提升產品的利用率,同時降低用戶的擴展成本。

高速芯片,性能
配備西門子高速處理器芯片,基本指令執行時間可達0.15 μ s,在同級別小型PLC中遙遙優秀。一顆強有力的“芯”,能讓您在應對繁瑣的程序邏輯,復雜的工藝要求時表現的從容不迫。

以太互聯,經濟便捷
CPU模塊本體標配以太網接口,集成了強大的以太網通信功能。一根普通的網線即可將程序下載到PLC中,方便快捷,省去了編輯電纜。通過以太網接口還可與其它CPU模塊、觸摸屏、計算機進行通信,輕松組網。

三軸脈沖,運動自如
CPU模塊本體多集成3路高速脈沖輸出,頻率高達100kHz,支持PWM/PTO輸出方式以及多種運動模式,可自由設置運動包絡。配以方便易用的向導設置功能,快速實現設備調整、定位等功能。

通用SD卡,快速更新
本機集成Micro SD卡插槽,使用市面上通用的Micro SD卡即可實現程序的更新和PLC固件升級,極大地方便了客戶工程師對終用戶的服務支持,也省去了因PLC固件升級返廠服務的不便。

軟件友好,編程高效
在繼承西門子編程軟件強大功能的基礎上,融入了更多的人性化設計,如新穎的帶狀式菜單、全移動式界面窗口、方便的程序注釋功能、強大的密碼保護等。在體驗強大功能的同時,大幅提高開發效率,縮短產品上市時間。

*整合,無縫集成
SIMATIC S7-200 SMART 可編程控制器,SIMATIC SMART LINE觸摸屏,SINAMICS V20變頻器和SINAMICS V90伺服驅動系統*整合,為OEM客戶帶來高性價比的小型自動化解決方案,滿足客戶對于人機交互、控制、驅動等功能的*需求。
(2)PC/PPI電纜、S7-200、電源模塊、通信電纜。
(3)V20驅動裝置和一臺PC機。
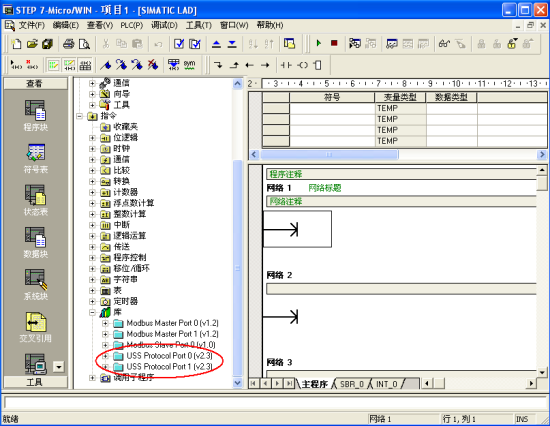
2、在使用MicroWin software 創建項目之前,確認USS庫文件已經安裝:
3、創建一個例程:
3.1 設置通訊接口
本例程使用PC/PPI電纜。

3.2 建立PC和PLC之間的連接
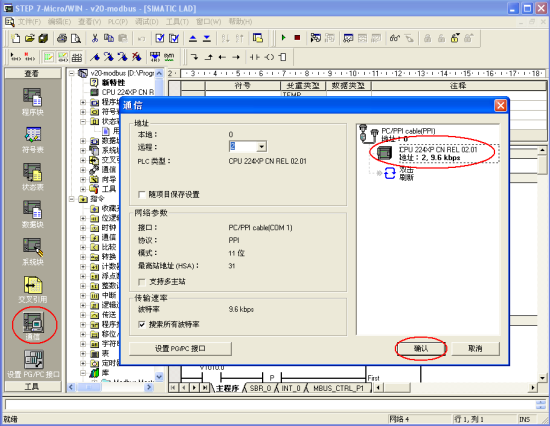
“雙擊刷新”搜索到PLC后,點擊”確認”。
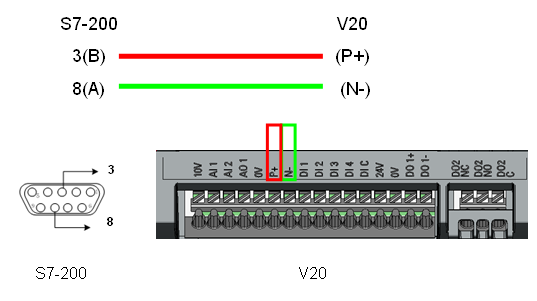
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規則:V20的
P+對3、N-對8),如下圖所示:
3.4 變頻器參數設置:
V20 可以通過選擇連接宏Cn010實現USS控制,也可以通過直接更改變頻器參數的方法來實現。參數設置如下表所示:
表一:
| 參數 | 描述 | Cn010默認值 | 實際設置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設定值 |
| P2023 | RS485協議選擇 | 1 | 1 | USS協議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字數 |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字數可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數據時間 |
天津西門子代理商
3.5 使用USS協議的初始化模塊初始化S7-200的PORT0端口:
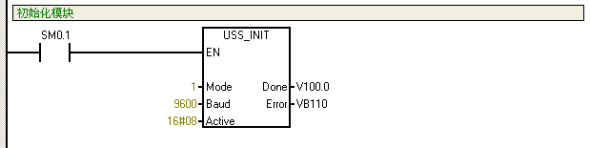
EN使能:每次改變通訊狀態都應該執行一次初始化指令。所以EN信號應該通過邊沿檢測元件脈沖激活。
Mode:用這個USS輸入值選擇通訊協議。
1:為端口0USS協議,并啟用該協議。
0:為端口0PPI協議,并禁止USS協議。
Baud: 波特率:9600,19200…115200。
Active:激活驅動地址。
Done:當USS_INIT 指令執行完成后,Done=1。
Error:指令執行的結果,如果有錯誤,顯示錯誤代碼。
Active:激活驅動地址舉例:

3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,為了運行變頻器需要按照表一設置參數:

狀態表:

功能塊定義:
EN:通常情況總是激活。
RUN:指示驅動為啟用(1),或禁止(0)。
OFF2:允許V20自由停車。
OFF3:允許V20快速停止。
F _ACK:V2*復位。
DIR:V20轉動方向(0:逆時針;1:順時針)。
Drive:V20地址 0-31。
Speed:速度給定值,以全速的百分比給出 (-200.0~~200.0%,負值時,V20反向)。
Resp_R:輪詢V20,掃描時=1,并更新下面值。
Error:錯誤字節,參見表:USS指令執行錯誤。
Status:V20返回狀態值。
Speed:V20速度,(-200.0~~200.0%)。
Run_EN:V20運行狀態(1:運行;0:停止)。
D_DIR:V20轉動方向(0:逆時針;1:順時針)
Inhibit:V20禁止位狀態。 (0:啟用;1:禁止)。要清除禁止位,必須將Fault清零,
RUN,OFF2, OFF3輸入也要清零。
Fault:指示故障狀態。根據V2*表確認故障。故障排除后,置位F _ACK使Fault
清零。
表二:Error 信息
| Error代碼 | 說明 |
| 0 | 沒有錯誤 |
| 1 | 驅動未響應 |
| 2 | 檢測到驅動響應中存在校驗和錯誤 |
| 3 | 檢測到驅動響應中存在奇偶校驗錯誤 |
| 4 | 由于用戶程序干擾導致出錯 |
| 5 | 嘗試執行了無效命令 |
| 6 | 提供的驅動地址無效 |
| 7 | 該通訊接口不能實現USS協議 |
| 8 | 該通訊接口正在忙于處理指令 |
| 9 | 驅動速度輸入溢出 |
| 10 | 驅動響應的長度不正確 |
| 11 | 驅動響應的首字符不正確 |
| 12 | 驅動響應的長度字符不正確 |
| 13 | 驅動響應錯誤 |
| 14 | 給出的DB_PTR地址不正確 |
| 15 | 給出的參數號不正確 |
| 16 | 選擇了無效的協議 |
| 17 | 啟用USS:不允許更改 |
| 18 | 了無效的波特率 |
| 19 | 無通訊:驅動未激活 |
| 20 | 驅動響應中的參數或值不正確 |
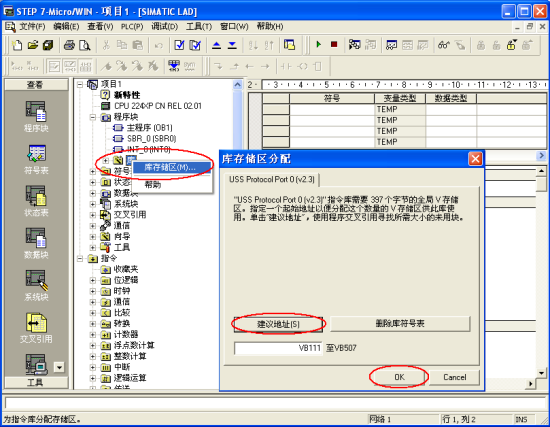
3.7 庫存儲區分配:在編譯程序之前,選擇 “程序塊” ->“ 庫” 右鍵,選擇“庫存儲區”。在點擊 “建議地址” 選擇V存儲區的地址后點擊 “OK”退出。
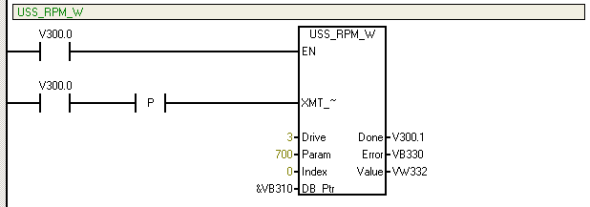
3.8 讀寫U16類型參數:
3.81舉例:使用USS_RPM_W讀取參數P0700的值;
狀態表:

注意:
(1)讀參數P0700,其數據類型為U16無符號整數。
(2)只要給V300.0一個上升沿,就完成一次P0700參數的讀操作。
(3)讀入的參數被放在VW332里。
(4)需要注意的是Index為0時代表讀Pxxx.0參數組
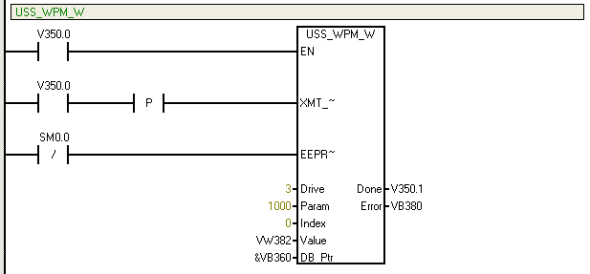
3.8.2 舉例:使用USS_RPM_W設置參數P1000。
狀態表:
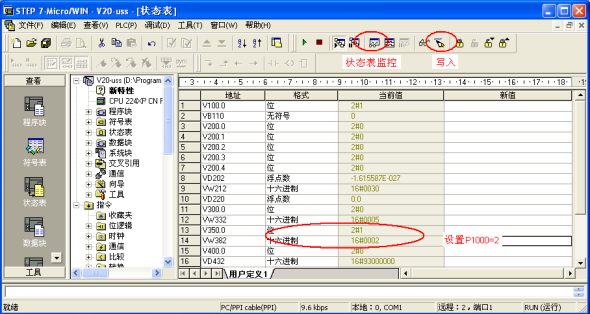
注意:
(1)寫參數P1000,其數據類型為U16無符號整數。
(2)只要給V350.0一個上升沿,就完成一次P1000參數的寫操作。
(3)EEPR~的邏輯為0時,寫入的值只保存到RAM中,為1時,寫入得值保存到EEPROM。
(4)EEPROM中寫數據是有次數限制的,V20多不超過50000次。
3.9 讀寫U32類型參數:
3.9.1舉例:使用USS_RPM_D讀取參數P0771.In000的值;
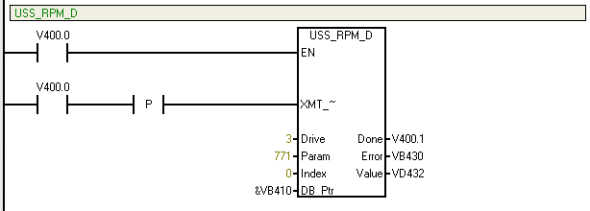
狀態表:
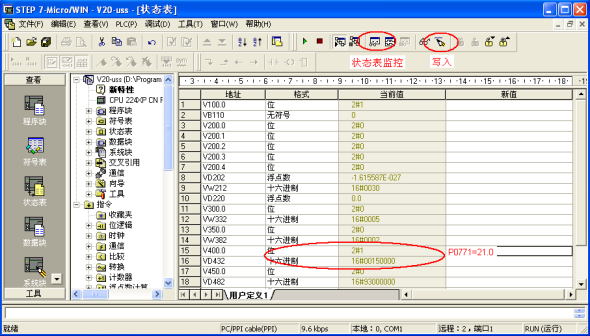
注意:
(1)讀參數P771,其數據類型為U32無符號整數。
(2)只要給V400.0一個上升沿,就完成一次P771參數的讀操作。
(3)讀入的參數被放在VD432里。16#00150000=21.0。
(4)需要注意的是Index為0時代表讀Pxxx.0參數組。
 化工儀器網
化工儀器網