 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)
















| 產(chǎn)地類別 | 進口 | 應用領域 | 環(huán)保,化工,生物產(chǎn)業(yè),電子/電池,電氣 |
|---|
產(chǎn)品簡介
詳細介紹
6ES7231-5QF32-0XB0 黃山西門子一級代理商 6ES7231-5QF32-0XB0 黃山西門子一級代理商
S7-200 SMART,超越SMART
S7-200 SMART是西門子針對中國的OEM市場研發(fā)的新一代PLC。作為S7-200CN的升級產(chǎn)品,一方面繼承了S7-200CN豐富的功能,另一方面融入了新的亮點,將全面覆蓋并超越S7-200CN。從產(chǎn)品上市至今,S7-200 SMART在包裝、紡織、機床、食品、橡塑等眾多行業(yè)得到廣泛應用,在提升設備性能和降低設備成本上發(fā)揮著重要作用。
SIMATIC S7-200 SMART 產(chǎn)品亮點
· 機型豐富,更多選擇
提供不同類型、I/O點數(shù)豐富的CPU模塊,單體I/O點數(shù)
可達60點,可滿足大部分小型自動化設備的控制需求。另外,CPU模塊配備標準型和經(jīng)濟型供用戶選擇,對于不同的應用需求,產(chǎn)品配置更加靈活,大限度的控制成本。
· 選件擴展,精確定制
新穎的信號板設計可擴展通信端口、數(shù)字量通道、模擬量通道。在不額外占用電控柜空間的前提下,信號板擴展能更加貼合用戶的實際配置,提升產(chǎn)品的利用率,同時降低用戶的擴展成本。
會PLC編程,可以說是現(xiàn)在很多電工的能力之一了,PLC編程是簡單的電工應用技術而已,可以說拿這個技術在社會上打拼并沒有太多優(yōu)勢。雖然也有很多類型的電工是可以不用進工廠的,比如工地上的,物業(yè)公司的,但是和工廠里邊的電工做事本質上沒有區(qū)別,進工廠不代表低人一等,這個心理狀態(tài)還是需要擺正的。
PLC主要應用場所是工廠,和工廠打交道才會出成績
PLC在學校里邊,早期是歸納到電氣自動化這個專業(yè)里邊的,電氣自動化,研究的對象是工廠里邊機械的控制,雖然現(xiàn)在很多民用的場所都已經(jīng)用到PLC,但是作用和工廠里邊的控制是一回事。
雖然PLC入門簡單,幾乎每個電工經(jīng)過短暫學習都可以掌握,但是做得非常深入也不容易的,每行都有每行的難點,市場上對中大型PLC掌握很熟練的人才也不算特別多,絕大部分人都是膚淺掌握了小型PLC的皮毛而已。
而想玩精PLC,還真要做很多項目,寫過非常多的梯形圖才可以達到目的的,至少也要在工廠里邊混個3-5年才敢說沒有什么PLC編程項目可以難倒你。這里說的工廠并不一定是固定某個工廠,相反可能需要多做一些行業(yè)的編程項目,這樣編程的視野才寬廣。
如果年紀輕,可以在工控項目公司混,經(jīng)常能出差各行業(yè)工廠那種,這樣才有機會接觸各種設備的PLC編程,見多摸多了,自然而言會形成自己的編程思路,水平才可以到達一定境界。
相反,如果一開始懂點編程皮毛,就要離開工廠這個平臺,那肯定是沒有機會繼續(xù)學習深造的,現(xiàn)在滿大街都是新出來的年輕人,很快就會被他們超越了。
如果離開工廠,PLC還有用處嗎
答案是肯定的,只要你的PLC編程基礎非常牢固,可以有很多種選擇的。技術只是人生一條路而已,很多人寫了一段時間的PLC程序,和各個工廠的客戶混熟了,就轉型自己接編程單,給一些客戶長期寫程序,雖然偶爾也要下一下工廠,但是時間都不長,這種職業(yè)也輕松瀟灑自由,畢竟還是靠自己的技術來繼續(xù)吃飯,但是做法和以往的簡單打工已經(jīng)*不一樣了。
也有很多人積累了一定的技術基礎,跑到一些PLC的產(chǎn)品部門里邊混個售后工程師,或者一些產(chǎn)品的技術支持,雖然偶爾也會下工廠,但是已經(jīng)是“老師"身份下去做指導了,因為有廠家的背景支持,這類工作也不累,當然出差是不可避免的。
技術轉型銷售也非常多,畢竟到了一定年齡,寫程序肯定是不如年輕人的,而轉型做銷售的,一般都喜歡打交道那類,因為有PLC編程經(jīng)驗,PLC和其他工控產(chǎn)品起來,客戶更加容易信服些。
自己開一家工控公司,找?guī)讉€志同道合的人一起創(chuàng)業(yè),也是很多PLC編程工程師的出路了,領幾個大點的項目,干一個月夠吃一年那種了,實現(xiàn)人生的創(chuàng)業(yè)目標。
另外就是轉型做嵌入式編程,從電氣轉向了電子,這種編程比PLC的技術含量要高很多,薪水也高很多,就業(yè)也容易,而且很多是不用下工廠的。
最后有一種,可以說*是脫離了工廠的,就是舉辦PLC編程培訓班,靠學員吃飯那種了,需要高一點的編程水平和一定的口才授課技巧,*是做老師了,當然最后也可以去技校做老師的。
高速芯片,性能
配備西門子高速處理器芯片,基本指令執(zhí)行時間可達0.15 μ s,在同級別小型PLC中*。一顆強有力的“芯",能讓您在應對繁瑣的程序邏輯,復雜的工藝要求時表現(xiàn)的從容不迫。
· 以太互聯(lián),經(jīng)濟便捷
CPU模塊本體標配以太網(wǎng)接口,集成了強大的以太網(wǎng)通信功能。一根普通的網(wǎng)線即可將程序下載到PLC中,方便快捷,省去了編輯電纜。通過以太網(wǎng)接口還可與其它CPU模塊、觸摸屏、計算機進行通信,輕松組網(wǎng)。
· 三軸脈沖,運動自如
CPU模塊本體多集成3路高速脈沖輸出,頻率高達100kHz,支持PWM/PTO輸出方式以及多種運動模式,可自由設置運動包絡。配以方便易用的向導設置功能,快速實現(xiàn)設備調整、定位等功能。
· 通用SD卡,快速更新
本機集成Micro SD卡插槽,使用市面上通用的Micro SD卡即可實現(xiàn)程序的更新和PLC固件升級,極大地方便了客戶工程師對終用戶的服務支持,也省去了因PLC固件升級返廠服務的不便。
· 軟件友好,編程高效
在繼承西門子編程軟件強大功能的基礎上,融入了更多的人性化設計,如新穎的帶狀式菜單、全移動式界面窗口、方便的程序注釋功能、強大的密碼保護等。在體驗強大功能的同時,大幅提高開發(fā)效率,縮短產(chǎn)品上市時間。
· *整合,無縫集成
SIMATICS7-200 SMART 可編程控制器,SIMATIC SMARTLINE觸摸屏,SINAMICS V20變頻器和SINAMICSV90伺服驅動系統(tǒng)*整合,為OEM客戶帶來高性價比的小型自動化解決方案,滿足客戶對于人機交互、控制、驅動等功能的*需求。
學習機器人的前提條件
學習該內容前須掌握以下的幾個知識點:
西門子S7-1500 PLC的基本知識,包括西門子系列PLC使用Profinet組態(tài)通訊的方式;西門子PLC中基本的數(shù)據(jù)類型組成(位,字節(jié),字和雙字),西門子PLC與第三方設備通訊后IO點映射的基本概念以及使用西門子PLC簡單編寫程序的能力。
1.2 機器人的簡單介紹
雅馬哈四軸機器人的四個軸分別是X軸,Y軸,Z軸以及R軸。具體的軸的位置見圖1-1。
所有的四軸機器人基本上是有這四個軸組成的,所以我們對其有個基本的了解就行,學習機器人主要是學習機器人的控制器。
下圖是雅馬哈四軸機器人的示例圖,可用于工業(yè)現(xiàn)場工件的抓取放置。

圖1-1
控制面板
2 控制器面板介紹
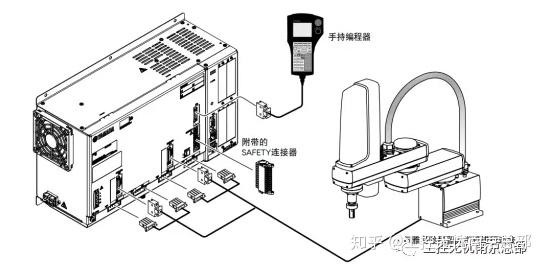
雅馬哈四軸機器人的控制為RCX340,具體的控制器上各個接口的作用如下圖所示:

圖2-1
RCX340控制器是雅馬哈機器人用來控制四軸機器人的控制器,它的外觀可見圖2-1。
上面的插頭口分別是軸1控制接頭,軸2控制接頭,軸三控制接頭,軸四控制接頭。
選件板(主要用于和第三方通訊,此次項目中使用到的是PROFINET通訊)。Enthernet接口:用于控制器與PC通訊。PB接口:用于連接示教器。若沒有選購示教器則接口處的插頭也不能拔掉,因為插頭中有廠家以及短接好的安全信號線。
電源端子:共兩組220V交流電源,一組是控制器電源,一組是伺服馬達電源。四組電池組:用于控制器的斷電數(shù)據(jù)保持,若將其拔掉則會報電池錯誤。四組電池組分別對應四個伺服軸。
軟硬
介紹
3.1 RCX340控制器接線操作
3.2 電路圖
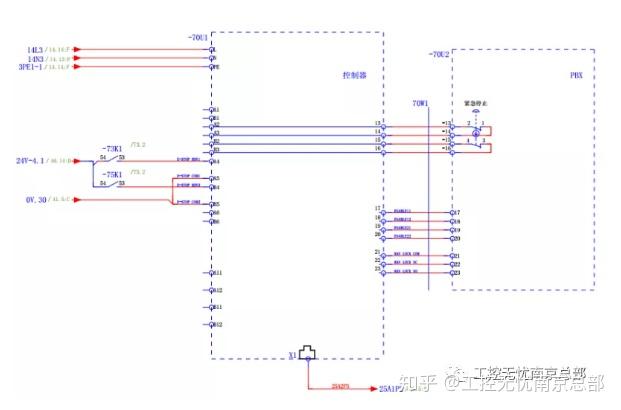
電路圖中L,N和PE是控制器的外部220V電源,該電源用于給控制器供電。圖中的A1-A6和B1-B6是控制器面板上的Safety信號,若不接外部控制信號則應將A1A2,A3A4,A5A6,B1B2,B3B4,B5B6相應的短接起來。
若需要接入安全信號或者急停則應按照上圖所示的接法接入外部安全信號。至于右邊的PBX接線則表示機器人示教器與控制器的接線,若選購了示教器則出廠時廠家會為你接好線,若沒選購廠家也會為你將插頭接口,所以這部分的接線圖僅供參考學習。
3.3 軟件介紹
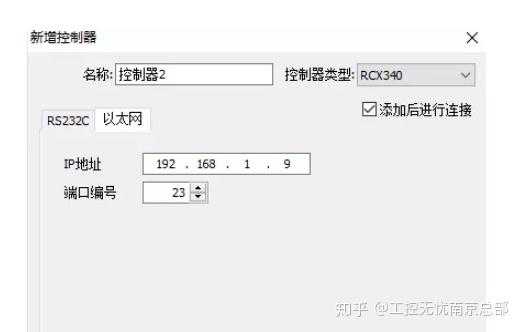
CX340控制器使用的編輯軟件是RCX-Studio。注意該控制器的另一個軟件為RCX-Studio Pro,該軟件是RCX-Studio到升級版。該軟件需要秘鑰,如無秘鑰使用RCX-Studio就行。下面我們來重點介紹該軟件的使用方法。打開該軟件,點擊新建連接彈出如圖2.2-1所示的界面,可使用網(wǎng)線連接。注意該控制器默認IP地址是192.168.0.2,端口號為23。
使用控制器RCX340可分為兩種情況來控制,具體可分為通過PLC控制器以及不通過PLC來控制。若不通過PLC來控制則需手動在軟件中將控制器的馬達上電。而使用PLC來控制RCX340則需要在PLC程序中寫上電程序和輸入緊急停止程序。具體的手動步驟可見附件說明書的《RCX-StudioPro_C_V.1.16》中的第四節(jié)P14頁聯(lián)機操作。該章節(jié)介紹了使用該軟件聯(lián)機時的操作,包括與控制器的連接,伺服上電,原點回歸,寸動移動,點位跟蹤以及監(jiān)控功能。將這一小節(jié)讀完可*掌握該軟件常用的一些操作。