 手機版
手機版 化工儀器網手機版
化工儀器網手機版
 化工儀器網小程序
化工儀器網小程序
 官方微信
官方微信 公眾號:chem17
公眾號:chem17
 掃碼關注視頻號
掃碼關注視頻號











 | 1FL6034-2AF21-1MB1 SIMOTICS S-1FL6 電源 230 V 三相交流 PN=0.4 kW;NN=3000 U M0=1.27 Nm;MN=1.27 Nm 軸 高度 30 mm 值編碼器 單匝 21 位帶滑鍵 公差 N,帶駐車制動器 防護等級 IP65,帶 適合驅動的油密封件 V90 |
EPOS 轉速如何設置?
假設負載轉動一圈對應長度單位為默認設置10000(P29247),當前速度給定1000(*1000LU/min)(按照齒輪比1:1)

那么設定速度為:1000*1000/10000=100RPM
但實際FB284管腳顯示為:
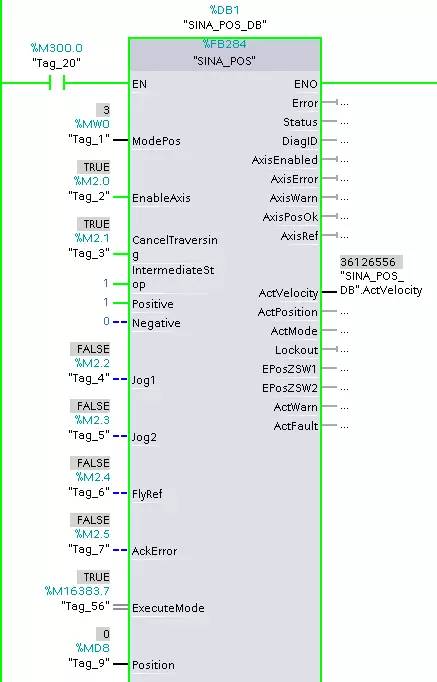
Actvelocity管腳顯示為:36126556
其實是因為實際速度反饋需要進行轉換:
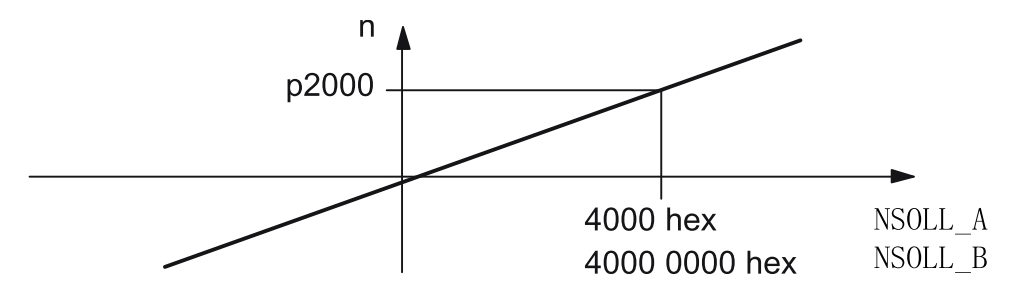
那么正確的轉化做法如下:
先將4000000H轉化為十進制浮點數為1073741824.0,再將實際顯示轉速轉換為浮點數后除以該值,然后乘以驅動中P2000的參考轉速值即可(本例中P2000=3000.0RPM),也就是:
36126556.0/1073741824.0*3000.0=100.0RPM(約等于)
 值編碼器掉電后位置丟失?
值編碼器掉電后位置丟失?
• EPOS模式下,掉電后單圈值編碼器電機是否移動超過了半圈,多圈值編碼器是否移動超過2048圈。
• 對于單圈值編碼器,可以按照以下方法設置虛擬多圈功能:
p29243 = 1激活位置跟蹤功能,參數p29244設置虛擬多圈圈數,大圈數可設置為2048,移動范圍為±1024。
FB284怎樣實現定位控制?
• 運行模式選擇 ModePos=2
• Jog1 及Jog2 必須設置為 "0"
• 軸必須已回零或編碼器已被校準
• CancelTransing=1,IntermediateS*,
• ConfigEpos=16#00000003
• 設置目標位置Position和速度Velocity,參數 Positive 及 Negative 必須為 "0"
• 通過輸入參數 OverV、OverAcc、OverDec 速度、加減速度的倍率,通常采取默認設置即可(100%)。
• 驅動的運行命令 EnableAxis=1
• ExecuteMode上升沿觸發定位運動
FB284怎樣實現相對定位控制?
• 運行模式選擇 ModePos=1
• Jog1 及Jog2 必須設置為 "0"
• 軸可以不回零或不校正值編碼器
• CancelTransing=1,IntermediateS*
• ConfigEpos=16#00000003
• 設置定位長度Position和速度Velocity,運動方向由Postion給定的正負決定
• 通過輸入參數 OverV、OverAcc、OverDec 速度、加減速度的倍率,通常采取默認設置即可(100%)。
• 驅動的運行命令 EnableAxis=1
• ExecuteMode上升沿觸發定位運動
FB284怎樣實現連續運行模式控制?
"連續運行"模式允許軸的位置控制器在正向或反向以一個恒定的速度運行
• 運行模式選擇 ModePos=3
• Jog1 及Jog2 必須設置為 "0"
• 軸不必回零或編碼器未被校正
• CancelTransing=1,IntermediateS*
• ConfigEpos=16#00000003
• 通過輸入參數 Velocity 運行速度,運行方向由 Positive 及 Negative 決定
• 通過輸入參數 OverV、OverAcc、OverDec 速度、加減速度的倍率,通常采取默認設置即可(100%)。
• 驅動的運行命令 EnableAxis=1
• ExecuteMode 的上升沿觸發定位運動
FB284怎樣實現程序塊運行控制?
此程序塊運行模式通過驅動功能"Traversing blocks"來實現,它允許自動創建程序塊、運行至檔塊、設置及復位輸出。
要求:
• 運行模式選擇ModePos=6
• ConfigEpos=16#00000003
• 軸靜止
• 軸必須已回零或值編碼器已校正
步驟:
• 工作模式、目標位置及動態響應已在V90 PN驅動的運行塊參數中進行設置,輸入參數 OverV、OverAcc、OverDec 速度、加減速度的倍率,通常采取默認設置即可(100%)。
• 運行條件"CancelTransing" 及 "IntermediateStop"必須設置為 "1",Jog1 及 Jog2 必須設置為 "0"
• 程序塊號在輸入參數 "Position" 中設置,取值應為 0~ 16
• 運動的方向由與工作模式及程序塊中的設置決定,與Positive 及Negative參數無關,必須將它們設置為"0"。
• 驅動的運行命令AxisEnable=1
選擇程序塊號后通過Execute Mode的上升沿來觸發運行。
FB284怎樣實現點動"Jog"控制?
點動運行模式通過驅動的"Jog"功能來實現。
要求:
• 運行模式選擇ModePos=7
• ConfigEpos=16#00000003
• 軸靜止
• 軸不必回零或值編碼器校正
步驟:
• 點動速度在V90 PN中設置,速度的OverV參數對于點動速度設定值進行倍率縮放,建議使用默認值100%
• 運行條件"CancelTransing" 及 "IntermediateStop"與點動運行模式無關,默認設置為 "1"
• 驅動的運行命令 AxisEnable=1
• 給出jog1或jog2信號
注意:
• Jog1 及Jog2 用于控制EPOS的點動運行,運動方向由V90 PN驅動中設置的點動速度來決定,默認設置為Jog1 = 負向點動速度,Jog2 = 正向點動速度 ,與Positive 及Negative參數無關,默認設置為"0"。
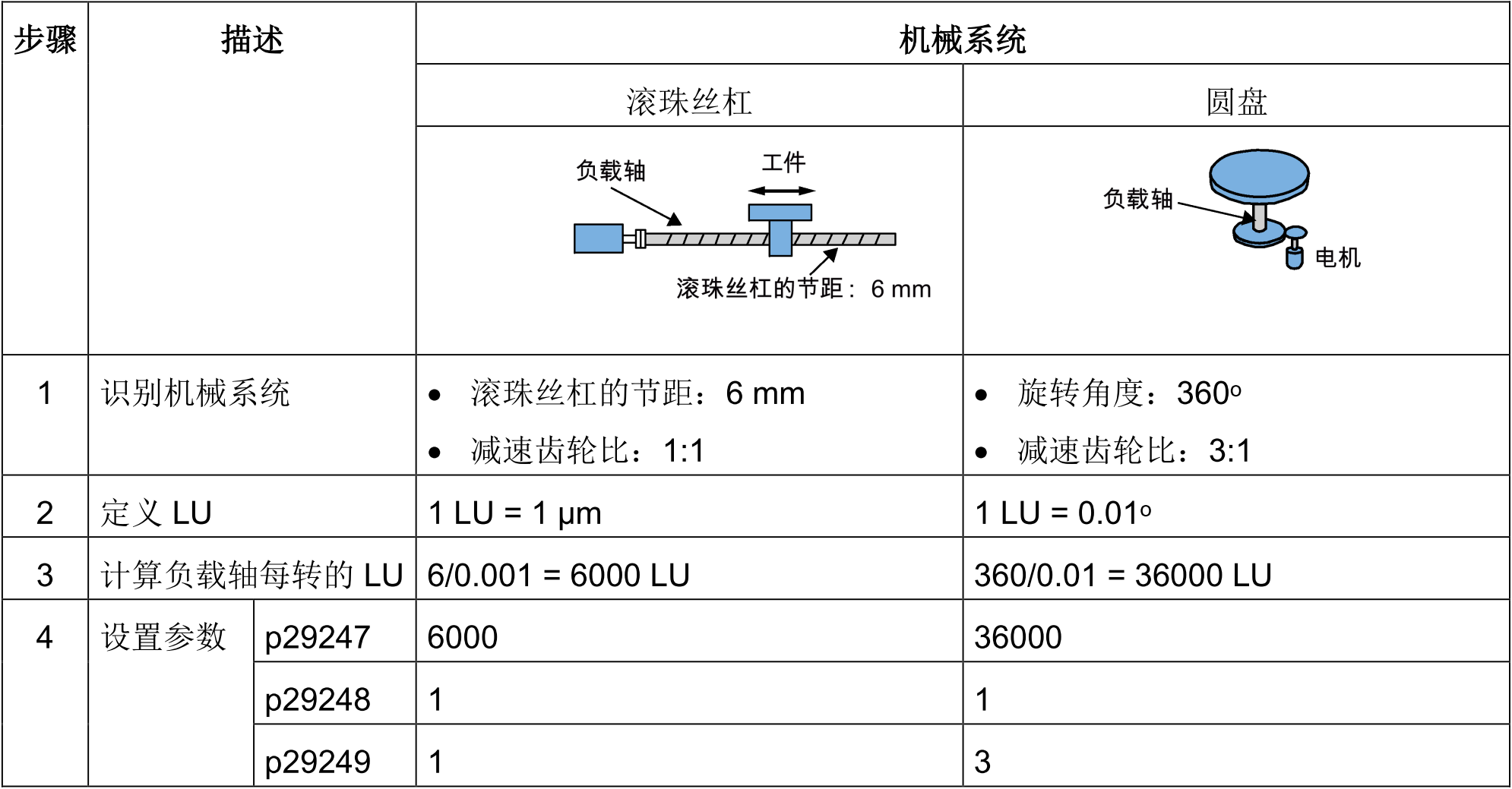
EPOS模式下機械參數如何設置?

EPOS模式在驅動中的位置單位為(LU),所有的位置設定,相關速度值和加速度值以及加加速度值在EPOS模式中都以LU為單位。
P29247為負載每轉的LU值,其可以自己定義。目的是讓負載每轉的位移單位與EPOS中的LU建立關系,例如:負載每轉10mm,P29247設置為10000LU,也就是10mm=10000LU,那么設定1LU,負載會位移0.001mm(=1um)
相關參數:

相關產品


免責聲明
- 凡本網注明“來源:化工儀器網”的所有作品,均為浙江興旺寶明通網絡有限公司-化工儀器網合法擁有版權或有權使用的作品,未經本網授權不得轉載、摘編或利用其它方式使用上述作品。已經本網授權使用作品的,應在授權范圍內使用,并注明“來源:化工儀器網”。違反上述聲明者,本網將追究其相關法律責任。
- 本網轉載并注明自其他來源(非化工儀器網)的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品第一來源,并自負版權等法律責任。
- 如涉及作品內容、版權等問題,請在作品發表之日起一周內與本網聯系,否則視為放棄相關權利。


 采購中心
采購中心